)
) A.直线传播
B.小孔成像 C.光的反射 D.光的色散
A.直线传播
B.小孔成像 C.光的反射 D.光的色散 ------次声波传播很远
------次声波传播很远 --------------------------固体也能传声
--------------------------固体也能传声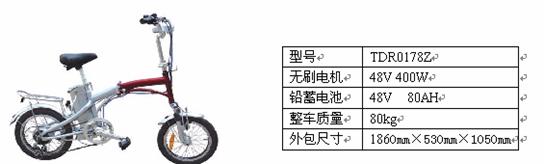 (3)在某平直路段上,电动自行车以额定功率攀速行驶时,受到的平均阻力为40N.若行驶速度为7m/s,则5s内动力对自行车所做的功是多少?电动自行车的效率是多大? (2+2分)
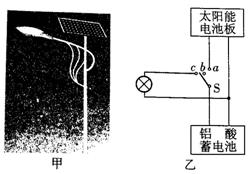
(3)在某平直路段上,电动自行车以额定功率攀速行驶时,受到的平均阻力为40N.若行驶速度为7m/s,则5s内动力对自行车所做的功是多少?电动自行车的效率是多大? (2+2分)33、(7分)为创建全国“环保节能模范城市”,新建的小区将普遍安装太阳能路灯。如图甲所示是某型号太阳能路灯,图乙是它的结构示意图,图丙是该太阳能路灯的技术参数。
|
某某太阳能路灯 太阳能电池:输出功率40W 铅酸蓄电池:12V 电 灯:“12V 10W”高效节能灯一只 照明时间:10小时每天,最多连续阴天4晚上 备注:配有太阳能路灯专用控制器(过充及过放 保护,光控、声控均可) |
丙
(1)太阳能路灯专用控制器实质上是一个由光、声音和时间控制的单刀多掷开关如图乙中的S。晚上要让电灯发光,控制器将控制开关S与 触点接触;铅酸蓄电池在充电过度或放电过度的情况下均会缩短使用寿命,为了避免铅酸蓄电池过充或过放,控制器将控制开关S与 触点接触即可。(2分)
(2)太阳能电板给蓄电池充电时把 能转换为电能。(1分)
(3) 铅酸蓄电池最多能储存多少千瓦时的电能? (2分)
(4)如果太阳光照射到地面时的辐射功率为1000J/( s·m2)(每一秒钟辐射在每1平方米上的光能为1000J),太阳能电池光电转换率为8%,则太阳能电池板的面积为多大?(2分)
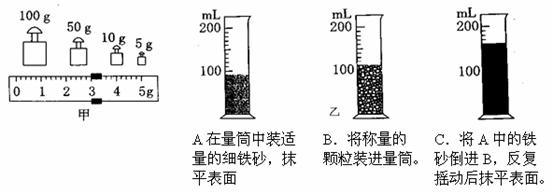 (5)某兴趣小组测量一种易溶于水且形状不规则的固体颗粒物质的密度,测量的部分方法和结果如图所示。
(5)某兴趣小组测量一种易溶于水且形状不规则的固体颗粒物质的密度,测量的部分方法和结果如图所示。31、(7分)“测量小灯泡电功率”的实验中,已知电源电压为3V,小灯泡的额定电压为2.5V。
(1) 在甲图中还有一根导线没有连接好,请把它连接好,要求:滑动变阻器滑片P向右移动灯泡变暗。
(2) 闭合开关前,应先将滑动变阻器的滑片移到_________端(选填“A”或“B”)。闭合开关后,发现小灯泡不亮,电流表指针偏转,电压表示数为零,产生故障的原因可能是___________________。
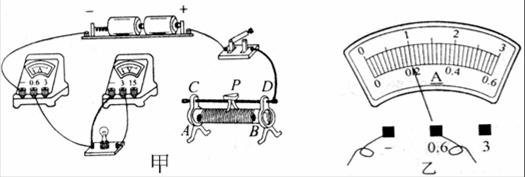
(3) 排除故障后,实验得到的数据如下表。在第1次实验中,小灯泡两端电压为2V时,电流表示数如图乙所示,则通过小灯泡的电流为_________A,此时小灯泡的实际功率为_________W。
|
实验次数 |
电压表示数U/V |
电流表示数I/A |
小灯泡电功率P/W |
|
1 |
2.0 |
|
|
|
2 |
2.5 |
0.22 |
0.55 |
|
3 |
2.8 |
0.24 |
0.67 |
(4) 由上表可知,小灯泡的额定功率为_________W。
(5) 某同学根据测出的三组数据求出各次电阻,发现灯泡不同电压下的电阻值不同,这是因为灯泡的电阻值与____________有关。
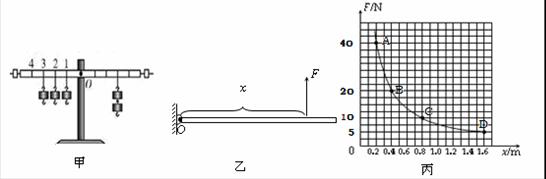
 ①实验前,应先调节杠杆在 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作:
①实验前,应先调节杠杆在 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作: