3. 在同一直线上的M、N两点正好是某电场中一条电场线上的两点,若在M点释放一个初速度为零的电子,电子仅受电场力作用,并沿电场线由M点运动到N点,其电势能随位移变化的关系如图所示,则下列说法正确的是( )
在同一直线上的M、N两点正好是某电场中一条电场线上的两点,若在M点释放一个初速度为零的电子,电子仅受电场力作用,并沿电场线由M点运动到N点,其电势能随位移变化的关系如图所示,则下列说法正确的是( )
在同一直线上的M、N两点正好是某电场中一条电场线上的两点,若在M点释放一个初速度为零的电子,电子仅受电场力作用,并沿电场线由M点运动到N点,其电势能随位移变化的关系如图所示,则下列说法正确的是( )| A. | 该电场有可能是匀强电场 | B. | N点的电势比M点电势低 | ||
| C. | 带电粒子的运动轨迹是曲线 | D. | 该电子运动的加速度越来越小 |
2.图中c、d为某电场中的一条电场线上的两点,以下说法中正确的是( )

| A. | c点的电势一定高于d点的电势 | B. | c点的场强一定大于d点的场强 | ||
| C. | 负电荷从c点到d点电势能一定增加 | D. | 正电荷从c点到d点电势能一定增加 |
1.某研究性学习小组设计了利用力传感器和光电门传感器探究“动能定理”的实验,他们将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,用力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车通过A、B两点时的速度v1和v2,如图所示.在小车上增减砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
(2)表格中M是M1与小车中砝码质量之和,△Εk为动能变化量,F是拉力传感器的示数,W是F在A、B间所做的功.表中的△Ε3=0.600,W3=0.610(结果保留三位有效数字).
(3)根据上述实验数据可以得出的实验结论:在实验误差允许的范围内,物体所受合外力的功等于动能的变化量.
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动.除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离;
③改变小车的质量或重物的质量,重复②的操作.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
(2)表格中M是M1与小车中砝码质量之和,△Εk为动能变化量,F是拉力传感器的示数,W是F在A、B间所做的功.表中的△Ε3=0.600,W3=0.610(结果保留三位有效数字).
| 次数 | M/kg | (v22-v12)/m2s-2 | △Εk/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △Ε3 | 1.22 | W3 |
| 4 | 1.00 | 2.40 | 1.20 | 2.42 | 1.21 |
| 5 | 1.00 | 2.84 | 1.42 | 2.86 | 1.43 |
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动.除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离;
③改变小车的质量或重物的质量,重复②的操作.
20. AD分别是斜面的顶端、底端,B、C是斜面上的两个点,AB=BC=CD,E点在D点的正上方,与A等高.从E点以一定的水平速度抛出两个小球,球1落在B点,球2落在C点,忽略空气阻力.关于球1和球2从抛出到落在斜面上的运动过程( )
AD分别是斜面的顶端、底端,B、C是斜面上的两个点,AB=BC=CD,E点在D点的正上方,与A等高.从E点以一定的水平速度抛出两个小球,球1落在B点,球2落在C点,忽略空气阻力.关于球1和球2从抛出到落在斜面上的运动过程( )
AD分别是斜面的顶端、底端,B、C是斜面上的两个点,AB=BC=CD,E点在D点的正上方,与A等高.从E点以一定的水平速度抛出两个小球,球1落在B点,球2落在C点,忽略空气阻力.关于球1和球2从抛出到落在斜面上的运动过程( )| A. | 球1和球2运动的时间之比为2:1 | |
| B. | 球1和球2抛出时初速度之比为2$\sqrt{2}$:1 | |
| C. | 球1和球2动能增加量之比为1:3 | |
| D. | 球1和球2运动时的加速度之比为1:2 |
19.以下关于打点计时器的相关说法正确的有( )
| A. | 电火花式打点计时器必须使用电压为220V的直流电源 | |
| B. | 实验时发现打点计时器打点周期不稳定是因为使用的电压不稳定 | |
| C. | 试验中为了减小摩擦,每次测量时应先将纸带理顺 | |
| D. | 实验时在纸带上留下的不是圆点而是一列短线是因为电源频率不稳定 | |
| E. | 电磁式打点计时器纸带必须穿过限位孔,并注意把纸带压在复写纸的下面 | |
| F. | 实验时必须先接通电源再释放纸带,实验结束后,先取下纸带再关闭电源 |
18.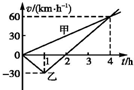 当t=0时,甲、乙两汽车从相距70km的两地在同一直线上开始行驶,它们的v-t图象如图所示,忽略汽车掉头所需时间.下列对汽车运动状况的描述可能正确的是( )
当t=0时,甲、乙两汽车从相距70km的两地在同一直线上开始行驶,它们的v-t图象如图所示,忽略汽车掉头所需时间.下列对汽车运动状况的描述可能正确的是( )
当t=0时,甲、乙两汽车从相距70km的两地在同一直线上开始行驶,它们的v-t图象如图所示,忽略汽车掉头所需时间.下列对汽车运动状况的描述可能正确的是( )| A. | 在第1 h末,乙车改变运动方向 | |
| B. | 在第2 h末,甲、乙两车相距130km | |
| C. | 在前4 h内,乙车运动加速度的大小总比甲车的大 | |
| D. | 在第4 h末,甲、乙两车相遇 |
17.关于自由落体运动,下列说法中不正确的是( )
| A. | 自由落体运动是竖直方向的匀加速直线运动 | |
| B. | 自由落体运动在开始的连续三个2 s末的速度之比是1:2:3 | |
| C. | 自由落体运动在开始的连续三个2 s内的位移之比是1:3:5 | |
| D. | 前3 s竖直方向的位移只要满足s1:s2:s3=1:4:9的运动一定是自由落体运动 |
16.2011年5月31日,国际田联挑战赛捷克俄斯特拉发站比赛结束,牙买加“飞人”博尔特以9.91s的成绩赢得100m大战.博尔特也曾以19.30s的成绩获得2008年北京奥运会200m比赛的金牌.关于他在这两次比赛中的运动情况,下列说法正确的是( )
| A. | 200m比赛的位移是100m比赛位移的两倍 | |
| B. | 200m比赛的平均速度约为10.36m/s | |
| C. | 100m比赛的平均速度约为10.09m/s | |
| D. | 100m比赛的最大速度约为20.18m/s |
 泽州同学从家出发步行到学校,要先向东走400m,然后再向北走600m,最后再向东走400m才能到达学校,所用时间为16min,如图所示.则
泽州同学从家出发步行到学校,要先向东走400m,然后再向北走600m,最后再向东走400m才能到达学校,所用时间为16min,如图所示.则
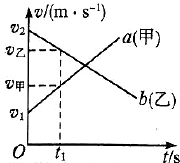
14.甲和乙两个物体在同一条直线上运动,它们的v-t图象分别如图中a、b所示,在t1时刻( )
0 147947 147955 147961 147965 147971 147973 147977 147983 147985 147991 147997 148001 148003 148007 148013 148015 148021 148025 148027 148031 148033 148037 148039 148041 148042 148043 148045 148046 148047 148049 148051 148055 148057 148061 148063 148067 148073 148075 148081 148085 148087 148091 148097 148103 148105 148111 148115 148117 148123 148127 148133 148141 176998
| A. | 它们在运动方向相同 | B. | 它们的运动方向相反 | ||
| C. | 甲的速度比乙的速度大 | D. | 甲和乙的加速度的方向相反 |