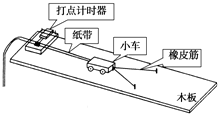
 “探究功与物体速度变化的关系”的实验如图甲所示,当小车在一条橡皮筋的作用下弹出时,橡皮筋对小车做的功记为W.当用2条、3条…完全相同的橡皮筋并在一起进行第2次、第3次…实验时,使每次实验中橡皮筋伸长的长度都保持一致.每次实验中小车获得的速度由打点计时器所打的纸带测出.
“探究功与物体速度变化的关系”的实验如图甲所示,当小车在一条橡皮筋的作用下弹出时,橡皮筋对小车做的功记为W.当用2条、3条…完全相同的橡皮筋并在一起进行第2次、第3次…实验时,使每次实验中橡皮筋伸长的长度都保持一致.每次实验中小车获得的速度由打点计时器所打的纸带测出.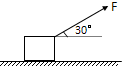 如图所示,物块放在水平面上,用与水平方向成30°角斜向上的拉力F拉物块时,物块能在水平面上作匀速直线运动,若F大小不变,而改用沿水平方向拉物块,物块仍能在水平地面作匀速直线运动,求物块与水平面间的动摩擦因数.
如图所示,物块放在水平面上,用与水平方向成30°角斜向上的拉力F拉物块时,物块能在水平面上作匀速直线运动,若F大小不变,而改用沿水平方向拉物块,物块仍能在水平地面作匀速直线运动,求物块与水平面间的动摩擦因数.
9.如图甲,手提电脑散热底座一般设置有四个卡位用来调节角度.某同学将电脑放在散热底座上,为了获得更好的舒适度,由原卡位4缓慢地调至卡位1来增大倾角(如图乙),电脑始终静止在底座上,则( )

| A. | 电脑受到重力、支持力、摩擦力和下滑力 | |
| B. | 电脑受到的摩擦力变小 | |
| C. | 散热底座对电脑的作用力变大 | |
| D. | 散热底座对电脑的作用力方向竖直向上 |
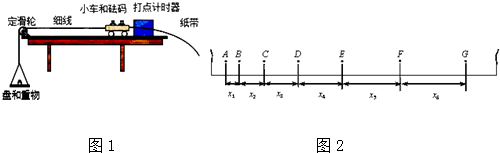
8. 某实验小组利用力传感器和光电门传感器探究“动能定理”,将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示,在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
某实验小组利用力传感器和光电门传感器探究“动能定理”,将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示,在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C(点C在光电门B的右侧),由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门之间的距离(或AB间距离);
③改变小车的质量或重物的质量,重复②的操作.
(2)下面表格中M是M1与小车中砝码质量之和,(△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600,W3=0.610(精确到小数点后二位).
(3)根据表中的数据,请在图2坐标上作出△E-W图线.

某实验小组利用力传感器和光电门传感器探究“动能定理”,将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示,在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C(点C在光电门B的右侧),由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门之间的距离(或AB间距离);
③改变小车的质量或重物的质量,重复②的操作.
(2)下面表格中M是M1与小车中砝码质量之和,(△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600,W3=0.610(精确到小数点后二位).
| 次数 | M/kg | |v22-v12|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.22 | W3 |
| 4 | 1.00 | 2.40 | 1.20 | 2.42 | 1.21 |
| 5 | 1.00 | 2.84 | 1.42 | 2.86 | 1.43 |
7.假想在不久的将来,嫦娥探测器搭载航天员飞向月球,实现中国人的登月梦想.载人嫦娥探测器经过地月转移轨道后,进人距离月面H=100公里的环月圆轨道运动,然后择机在月球虹湾地区实行软着陆,展开月面巡视勘察.航天员让一重物在距离月球地表面h高处以v0的速度竖直向上抛出,测得重物经过时间T落回地表面.已知万有引力常量为G,月球可看 作球体,月球半径为R.下列说法正确的是( )
| A. | 探测器在月球上软着陆的过程中,航天员处于超重状态 | |
| B. | 月球表面重力加速度大小为$\frac{2{(v}_{0}T-h)}{{T}^{2}}$ | |
| C. | 探测器在距离月面H高的环月圆轨道运动的线速度大小为$\frac{R}{T}$$\sqrt{\frac{2{(v}_{0}T+h)}{R+H}}$ | |
| D. | 月球的平均密度为$\frac{3π}{{GT}^{2}}$ |
6. 如图所示,在摩擦可忽略的水平面上停着一辆小车,小车的左端放着一只箱子.在水平恒力F作用下,把箱子从小车的左端拉至右端卸下.如果一次小车被制动,另一次小车未被制动,小车可沿地面运动,在这两种情况下有( )
如图所示,在摩擦可忽略的水平面上停着一辆小车,小车的左端放着一只箱子.在水平恒力F作用下,把箱子从小车的左端拉至右端卸下.如果一次小车被制动,另一次小车未被制动,小车可沿地面运动,在这两种情况下有( )
如图所示,在摩擦可忽略的水平面上停着一辆小车,小车的左端放着一只箱子.在水平恒力F作用下,把箱子从小车的左端拉至右端卸下.如果一次小车被制动,另一次小车未被制动,小车可沿地面运动,在这两种情况下有( )| A. | 箱子与车面之间的摩擦力一样大 | B. | 水平恒力F所做的功一样大 | ||
| C. | 箱子获得的加速度一样大 | D. | 箱子获得的动能一样大 |
5.2004年我国和欧盟合作的建国以来最大的国际科技合作计划“伽利略计划”将进入全面实施阶段,这标志着欧洲和我国都将拥有自己的卫星导航定位系统,并将结束美国全球定位系统(GPS)在世界独占鳌头的局面.据悉“伽利略”卫星定位系统将由30颗轨道卫星组成,卫星的轨道高度为2.4×104m,倾角为560,分布在3个轨道上,每个轨道面部署9颗工作卫星和1颗在轨备份卫星.当某颗卫星出现故障时可及时顶替工作.若某颗替补卫星处在略低于工作卫星的轨道上,则这颗卫星的周期和速度与工作卫星相比较,以下说法中正确的是( )
0 147681 147689 147695 147699 147705 147707 147711 147717 147719 147725 147731 147735 147737 147741 147747 147749 147755 147759 147761 147765 147767 147771 147773 147775 147776 147777 147779 147780 147781 147783 147785 147789 147791 147795 147797 147801 147807 147809 147815 147819 147821 147825 147831 147837 147839 147845 147849 147851 147857 147861 147867 147875 176998
| A. | 替补卫星的周期大于工作卫星的周期,速度大于工作卫星的速度 | |
| B. | 替补卫星的周期小于工作卫星的周期,速度大于工作卫星的速度 | |
| C. | 替补卫星的周期大于工作卫星的周期,速度小于工作卫星的速度 | |
| D. | 替补卫星的周期小于工作卫星的周期,速度小于工作卫星的速度 |