题目内容
【题目】如图所示,某小组同学利用DIS 实验装置研究支架上力的分解。A、B 为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负。A 连接质量不计的细绳,并可沿固定的圆弧形轨道移动。B 固定不动,通过光滑铰链连接一轻杆,将细绳连接在杆右端O 点构成支架,调整使得O 点位于圆弧形轨道的圆心处,保持杆沿水平方向。随后按如下步骤操作:
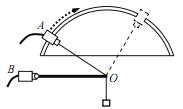
①测量绳子与水平杆的夹角∠AOB=θ;
②对两个传感器进行调零;
③用另一绳在O 点悬挂住一个钩码,记录两个传感器读数;
④取下钩码,移动传感器A,改变θ 角,重复上述步骤①②③④,得到图示数据表格a。
(1)根据表格a,可知A 传感器对应的是表中的力____(填“F1”或“F2”),
并求得钩码质量为______kg (保留一位有效数字);
(2)换用不同钩码做此实验,重复上述实验步骤,得到数据表格b。则表格b 中30°所对应的F2 空缺处数据应为_______N;

(3)实验中,让A 传感器沿圆心为O 的圆弧形(而不是其它的形状)轨道移动的主要目的是
(单选):__________
A.方便改变A 传感器的读数 B.方便改变B 传感器的读数
C.保持轻杆右端O 的位置不变 D.方便改变细绳与杆的夹角θ
【答案】 F1 ![]() -0.955N C
-0.955N C
【解析】(1)因绳子只能提供拉力,故A传感器对应的是表中力F1,对节点O受力分析有F1sin30°=mg,解得m=0.05Kg
(2)对于O点,受力平衡,O点受到F1、F2即钩码向下的拉力,根据几何关系可知,
F2=F1cos30°=1.103×![]() =0.955N,因为B受到的是压力,所以F2空缺处数据应为-0.955N.
=0.955N,因为B受到的是压力,所以F2空缺处数据应为-0.955N.
(3)实验中,让A 传感器沿圆心为O 的圆弧形轨道移动的主要目的是:保持轻杆右端O 的位置不变,从而保证OB水平,故选C.