题目内容
7.一个带电小球从空中的a点运动到b点的过程中,重力做功0.3J,电场力做功0.1J.则小球( )①在a点的重力势能比在b点大0.3J ②在a点的电势能比在b点小0.1J
③在a点的动能比在b点小0.4J ④在a点的机械能比在b点小0.1J.
| A. | ①②③正确 | B. | ①③④正确 | C. | ①②④正确 | D. | ②③④正确 |
分析 解决本题需掌握:
重力做功等于重力势能的变化量;
电场力做功等于电势能的变化量;
合力做功等于动能的变化量;
除重力外的各个力做的总功等于机械能的变化量.
解答 解:①小球从a点运动到b点的过程中,重力做功0.3J,重力势能减小,所以在a点的重力势能比在b点大0.3J故①正确;
②小球从a点运动到b点的过程中,电场力做功0.1J,电势能减小,在a点的电势能比在b点大0.1J.故②错误;
③重力做功0.3J,电场力做功0.1J,根据动能定理,合力做功等于动能的变化量,所以在a点的动能比在b点小0.4J.故③正确;
④小球从a点运动到b点的过程中,电场力做功0.1J,小球的机械能增加0.1J,所以在a点的机械能比在b点小0.1J.故④正确.
故选:B
点评 功是能量转化的量度,有多种表现形式:重力做功是重力势能变化的量度;电场力做功是电势能变化的量度;合力做功是动能变化的量度;重力外的各个力做的总功是机械能变化的量度.

练习册系列答案
 补充习题江苏系列答案
补充习题江苏系列答案 学练快车道口算心算速算天天练系列答案
学练快车道口算心算速算天天练系列答案
相关题目
 将质量分布均匀、重为G、半径为R的光滑圆球,用长度也为R的细绳拴在竖直墙上,求绳子对球的拉力FT和墙对球的作用力FN的大小.
将质量分布均匀、重为G、半径为R的光滑圆球,用长度也为R的细绳拴在竖直墙上,求绳子对球的拉力FT和墙对球的作用力FN的大小.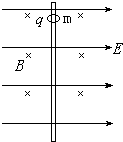 如图所示,在互相垂直的水平方向的匀强电场E和匀强磁场B中,有一固定的竖直绝缘杆,杆上套一个质量为m、电量为q的小球,它们之间的摩擦因数为μ,现由静止释放小球,试分析小球运动的加速度和速度的变化情况,并求出最大速度vmax和最大加速度amax.(mg>μqE);若将磁场的方向反向而保持其他因素都不变,最大速度vmax和最大加速度amax又是多少?
如图所示,在互相垂直的水平方向的匀强电场E和匀强磁场B中,有一固定的竖直绝缘杆,杆上套一个质量为m、电量为q的小球,它们之间的摩擦因数为μ,现由静止释放小球,试分析小球运动的加速度和速度的变化情况,并求出最大速度vmax和最大加速度amax.(mg>μqE);若将磁场的方向反向而保持其他因素都不变,最大速度vmax和最大加速度amax又是多少?
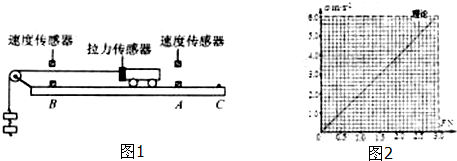
15.如图1为探究“加速度与物体受力的关系”的实验装置,在长木板上相距L=48.0m的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.小车受到拉力的大小用拉力传感器记录:
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速度率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表记录了实验测得的几组数据,△v2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字).
(3)由表中数据在所示的坐标纸上攒点并作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速度率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表记录了实验测得的几组数据,△v2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字).
| 次数 | F(N) | △v2($\frac{{m}^{2}}{{s}^{2}}$) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.00 | 3.48 | 3.63 |
| 5 | 2.62 | 4.65 | 4.84 |
| 6 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.

12.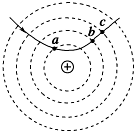 如图所示,真空中某点固定一带电的点电荷,图中虚线为一组相同间距相等的同心圆,圆心与该点电荷重合.一带电粒子以一定初速度射入电场,实线为该粒子仅在电场力作用下的运动轨迹,a、b、c三点是实线与虚线的交点,则该粒子( )
如图所示,真空中某点固定一带电的点电荷,图中虚线为一组相同间距相等的同心圆,圆心与该点电荷重合.一带电粒子以一定初速度射入电场,实线为该粒子仅在电场力作用下的运动轨迹,a、b、c三点是实线与虚线的交点,则该粒子( )
如图所示,真空中某点固定一带电的点电荷,图中虚线为一组相同间距相等的同心圆,圆心与该点电荷重合.一带电粒子以一定初速度射入电场,实线为该粒子仅在电场力作用下的运动轨迹,a、b、c三点是实线与虚线的交点,则该粒子( )| A. | 带正电 | |
| B. | 在c点受力最大 | |
| C. | 在b点的电势能大于在c点的电势能 | |
| D. | 由a点到b点的动能变化小于由b点到c点的动能变化 |
 下暴雨时,有时会发生山体滑坡或泥石流等地质灾害.某地有一倾角为θ=37°(sn37°=0.6 cos37°=0.8)的山坡C,上面有一质量为2m的石板B,其上下表面与斜坡平行;B上有一碎石堆A(含有大量泥土),A和B均处于静止状态,如图所示.假设某次暴雨中,A浸透雨水后总质量为m(可视为质量不变的滑块),在极短时间内,A、B间的动摩擦因数μ1减小为$\frac{3}{8}$,B、C间的动摩擦因数μ2减小为0.5,A、B开始运动.已知A开始运动时,A离B下边缘的距离l=12m,C足够长.取重力加速度大小g=10m/s2.
下暴雨时,有时会发生山体滑坡或泥石流等地质灾害.某地有一倾角为θ=37°(sn37°=0.6 cos37°=0.8)的山坡C,上面有一质量为2m的石板B,其上下表面与斜坡平行;B上有一碎石堆A(含有大量泥土),A和B均处于静止状态,如图所示.假设某次暴雨中,A浸透雨水后总质量为m(可视为质量不变的滑块),在极短时间内,A、B间的动摩擦因数μ1减小为$\frac{3}{8}$,B、C间的动摩擦因数μ2减小为0.5,A、B开始运动.已知A开始运动时,A离B下边缘的距离l=12m,C足够长.取重力加速度大小g=10m/s2.