题目内容
6.有一种测量压力的电子秤,其原理图如图1所示.E是内阻不计、电动势为6V的电源.R0是一个阻值为400Ω的限流电阻.G是由理想电流表改装成的指针式测力显示器.R是一个压敏电阻,其阻值可随压力大小变化而改变,其关系如表所示.C是一个用来保护显示器的电容器.秤台的重力忽略不计.| 压力F/N | 0 | 50 | 100 | 150 | 200 | 250 | 300 | … |
| 电阻R/Ω | 300 | 280 | 260 | 240 | 220 | 200 | 180 | … |
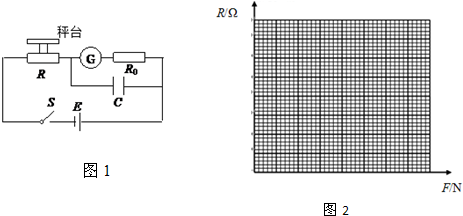
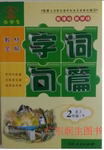
(1)利用表中的数据,以F为横坐标,R为纵坐标,画出所对应的R-F图象;
(2)根据图象写出归电阻R随压力F变化的函数表达式F=1750-$\frac{15}{I}$;
(3)该测力显示器的刻度不是均匀(填是或不是)
(4)若电容器的耐压值为5V,该电子秤的最大称量值为550牛顿.
分析 (1)根据电阻随压力变化的数据来画图,把压力和电阻作为一组有序数对在坐标系中描点然后连接即可.再根据R的阻值随压力F的大小变化的图象可知电阻与压力成一次函数关系,利用待定系数法可确定函数关系式.
(2)根据欧姆定律推导串联电路电流的关系式,结合R与F的关系式推导压力与电流的关系式可知测力显示器的刻度是否均匀.
(3)根据串联电路电压规律可知压敏电阻两端的电压,根据串联电路特点可计算压敏电阻的值,进一步计算测力计的最大测量值.
解答  解:(1)把压力大小作为横坐标,把电阻大小作为纵坐标,在坐标系中描点连线即可得压敏电阻R的阻值随压力F的大小变化的图象.如图.
解:(1)把压力大小作为横坐标,把电阻大小作为纵坐标,在坐标系中描点连线即可得压敏电阻R的阻值随压力F的大小变化的图象.如图.
(2)根据R的阻值随压力F的大小变化的图象可知压敏电阻R的阻值与压力F成一次函数关系,设它们的关系式为R=KF+b.
把F=50N,R=280Ω和F=100N,R=260Ω代入得:
280=50K+b…①,
260=100K+b…②.
①②构成方程组
解得K=-0.4,b=300,
所以它们的关系式为R=300-0.4F.
(3)根据欧姆定律得 I=$\frac{U}{R+{R}_{0}}$
把R=-0.4F+300,U=6V,R0=400Ω代入上式
化简得:F=1750-$\frac{15}{I}$
所以压力和电流不成一次函数关系,故该测力显示器的刻度是不均匀的.
(4)从上式可知,压力增大时,压敏电阻值减小,
当电阻两端的电压为5V时,压敏电阻两端的电压为:
U1=U-U0=6V-5V=1V
根据串联电路特点可得$\frac{R}{{R}_{0}}$=$\frac{{U}_{1}}{{U}_{0}}$=$\frac{1}{5}$
即$\frac{R}{400}$=$\frac{1}{5}$
得 R=80Ω
把R=80Ω代入R=300-0.4F.
即80=-0.4F+300
解得F=550N.
故答案为:(1)如图所示;
(2)R=300-0.4F
(3)不是
(4)550
点评 本题考查学生对欧姆定律和串联电流特点的掌握并结合函数知识对实际问题做出正确的判断.注意该种传感器在生产生活中的应用及原理.

 教材全解字词句篇系列答案
教材全解字词句篇系列答案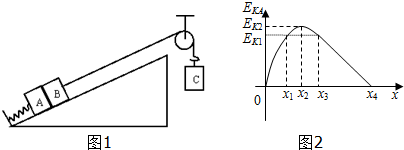
| A. | 挂上C的瞬间,A的加速度仍为0 | |
| B. | A、B分离时,弹簧的形变量为$\frac{{m}_{A}gsinθ}{k}$ | |
| C. | 在运动到x2时刻弹簧的弹性势能为mAg(x4-x2)sinθ-Ek2 | |
| D. | 从x2到x3,弹簧的弹性势能改变了mg(x3-x2)sinθ+Ek1-Ek2 |
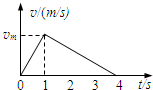 在水平公路上,汽车由静止开始做匀加速运动,当速度达到vm后立即关闭发动机,汽车滑行直至停止,其运动过程v-t图象如图所示,汽车牵引力大小为F,
在水平公路上,汽车由静止开始做匀加速运动,当速度达到vm后立即关闭发动机,汽车滑行直至停止,其运动过程v-t图象如图所示,汽车牵引力大小为F,摩擦力为Ff,全过程牵引力做功为W,克服摩擦力做功为Wf,则( )
| A. | F:Ff=3:1 | B. | F:Ff=1:4 | C. | W:Wf=1:1 | D. | W:Wf=1:3 |
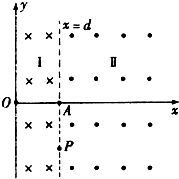 如图所示,在xOy直角坐标系内,0≤x≤d及x>d范围内存在垂直于xOy平面且等大反向的匀强磁场Ⅰ、Ⅱ,方向如图中所示,直线x=d与x轴交点为A.坐标原点O处存在粒子源,粒子源在xOy平面内向x>O区域的各个方向发射速度大小均为v0的同种粒子,粒子质量为m,电荷量为-q,其中沿+x方向射出的粒子,在磁场I中的运动轨迹与x=d相切于P(d,-d)点,不计粒子重力;
如图所示,在xOy直角坐标系内,0≤x≤d及x>d范围内存在垂直于xOy平面且等大反向的匀强磁场Ⅰ、Ⅱ,方向如图中所示,直线x=d与x轴交点为A.坐标原点O处存在粒子源,粒子源在xOy平面内向x>O区域的各个方向发射速度大小均为v0的同种粒子,粒子质量为m,电荷量为-q,其中沿+x方向射出的粒子,在磁场I中的运动轨迹与x=d相切于P(d,-d)点,不计粒子重力;| A. | 电磁打点计时器使用的是6V左右的直流电源 | |
| B. | 在测量物体速度时,先让物体运动,后接通电源 | |
| C. | 使用的电源频率越高,打点的时间间隔就越大 | |
| D. | 在同一纸带上打的点越密,说明物体运动的速度越慢 |
| A. | 它是人造地球卫星绕地球运行的最小速度 | |
| B. | 它是近地圆形轨道上人造地球卫星的运行速度 | |
| C. | 它是能使卫星进入近地轨道的最小速度 | |
| D. | 它是能使卫星进入近地轨道的最大速度 |
| A. | 20m/s | B. | 10m/s | C. | 7.5m/s | D. | 15m/s |
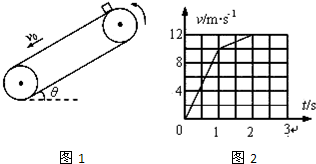 如图1所示,倾角为θ的足够长的传送带以恒定的速率v0沿逆时针方向运行.t=0时,将质量m=1kg的物体(可视为质点)轻放在传送带上,物体相对地面的v-t图象如图2所示.设沿传送带向下为正方向,取重力加速度g=10m/s2.则( )
如图1所示,倾角为θ的足够长的传送带以恒定的速率v0沿逆时针方向运行.t=0时,将质量m=1kg的物体(可视为质点)轻放在传送带上,物体相对地面的v-t图象如图2所示.设沿传送带向下为正方向,取重力加速度g=10m/s2.则( )| A. | 传送带的速率v0=12m/s | |
| B. | 传送带的倾角θ=30° | |
| C. | 物体与传送带之间的动摩擦因数?=0.5 | |
| D. | 0~2.0s摩擦力对物体做功Wf=-24J |
 如图所示,竖直平面内有一长l=0.3m的轻绳,上端系在钉子上,下端悬挂质量M=0.8kg的小球A,细线拉直且小球恰好静止在光滑水平面上.一质量m=0.2kg的小球B以速度=10m/s水平向左运动,与小球A发生对心碰撞,碰撞过程中无机械能损失,碰撞后小球A能在竖直面内做圆周运动.(g取10m/s2)求:
如图所示,竖直平面内有一长l=0.3m的轻绳,上端系在钉子上,下端悬挂质量M=0.8kg的小球A,细线拉直且小球恰好静止在光滑水平面上.一质量m=0.2kg的小球B以速度=10m/s水平向左运动,与小球A发生对心碰撞,碰撞过程中无机械能损失,碰撞后小球A能在竖直面内做圆周运动.(g取10m/s2)求: