题目内容
5.热传感器主要是应用了半导体材料制成的热敏电阻,热敏电阻随温度变化的图线如图a所示,图b为传感器制作的简单自动报警器线路图,其中R1是热敏电阻.则:
(1)为了使温度过高时报警器铃响,开关应接在a(填“a”或“b”)
(2)若使启动报警的温度提高些,应将滑动变阻器的滑片P点向左移动(填“左”或“右”).
分析 (1)温度升高热敏电阻阻值变小,控制电路电流变大,电磁铁磁性增强,工作电路中单刀双掷开关被吸到左侧,要想使工作电路中的报警器工作,工作电流应形成闭合回路,分析电路图,确定c应接在何处.
(2)要提高报警器的灵敏度,即温度更高时才可报警,滑动变阻器接入电路的阻值应大些,根据电路图确定滑片的移动方向.
解答 解:(1)温度升高热敏电阻变小,控制左边电路电流变大,电磁铁磁性变强、开关接触a点,要使温度过高时报警器报警,c应接在a处.
(2)滑片P向左移,滑动变阻器接入电路的阻值变大,在温度更高时控制电路才能有足够大电流,使磁铁有足够大引力吸引开关,因此滑片向左移可以提高报警器的灵敏度.
故答案为:(1)a;(2)左.
点评 本题考查学生对图象的认知及欧姆定律的使用,从图中得出热敏电阻的阻值与温度的变化关系是本题的突破口.

练习册系列答案
 孟建平错题本系列答案
孟建平错题本系列答案 超能学典应用题题卡系列答案
超能学典应用题题卡系列答案
相关题目
13.一个电池组的电动势为E,内阻为r,用它给一个线圈电阻为R的直流电动机供电,当电动机正常工作时,通过电动机的电流为I,电动机两端的电压为U,经t(s)后,则( )
| A. | 电源在内外电路做的功为IUt | B. | 电池消耗的化学能为IEt | ||
| C. | 电动机输出的机械能为IEt-I2rt | D. | 电池组的效率$\frac{U-Ir}{E}$ |
13. 如图所示,一质量为m的质点在半径为R的半球形容器中(容器固定)由静止开始自边缘上的A点滑下,到达最低点B时,它对容器的正压力为FN.重力加速度为g,则质点自A滑到B的过程中,摩擦力对其所做的功为( )
如图所示,一质量为m的质点在半径为R的半球形容器中(容器固定)由静止开始自边缘上的A点滑下,到达最低点B时,它对容器的正压力为FN.重力加速度为g,则质点自A滑到B的过程中,摩擦力对其所做的功为( )
如图所示,一质量为m的质点在半径为R的半球形容器中(容器固定)由静止开始自边缘上的A点滑下,到达最低点B时,它对容器的正压力为FN.重力加速度为g,则质点自A滑到B的过程中,摩擦力对其所做的功为( )| A. | $\frac{1}{2}$R(FN-3mg) | B. | $\frac{1}{2}$R(2mg-FN) | C. | $\frac{1}{2}$R(FN-mg) | D. | $\frac{1}{2}$R(FN-2mg) |
20.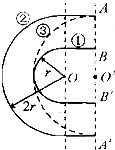 用物理模型的方法研究赛车过弯道的技术.假设赛车场的一段弯道如图所示,转弯处为圆心在O点的半圆,内外半径分别为r和2r,图中直线ABB'A'到圆心O的距离等于r.有一辆赛车(看成质点)要以图中线段AB为起点,经弯道到达线段A'B'.比较如图所示的三条路线:路线①沿赛道最内侧从B到B',路线②沿赛道最外侧从A到A',路线③是以BB'的中点O'为圆心的半圆.已知选择不同路线时,在垂直赛车速度方向上路面对轮胎的最大静摩擦大小都一样,且赛车沿每一路线行驶的全程都以过本路线中的圆弧时不打滑的最大速率匀速行驶.下列研究结果正确的是( )
用物理模型的方法研究赛车过弯道的技术.假设赛车场的一段弯道如图所示,转弯处为圆心在O点的半圆,内外半径分别为r和2r,图中直线ABB'A'到圆心O的距离等于r.有一辆赛车(看成质点)要以图中线段AB为起点,经弯道到达线段A'B'.比较如图所示的三条路线:路线①沿赛道最内侧从B到B',路线②沿赛道最外侧从A到A',路线③是以BB'的中点O'为圆心的半圆.已知选择不同路线时,在垂直赛车速度方向上路面对轮胎的最大静摩擦大小都一样,且赛车沿每一路线行驶的全程都以过本路线中的圆弧时不打滑的最大速率匀速行驶.下列研究结果正确的是( )
用物理模型的方法研究赛车过弯道的技术.假设赛车场的一段弯道如图所示,转弯处为圆心在O点的半圆,内外半径分别为r和2r,图中直线ABB'A'到圆心O的距离等于r.有一辆赛车(看成质点)要以图中线段AB为起点,经弯道到达线段A'B'.比较如图所示的三条路线:路线①沿赛道最内侧从B到B',路线②沿赛道最外侧从A到A',路线③是以BB'的中点O'为圆心的半圆.已知选择不同路线时,在垂直赛车速度方向上路面对轮胎的最大静摩擦大小都一样,且赛车沿每一路线行驶的全程都以过本路线中的圆弧时不打滑的最大速率匀速行驶.下列研究结果正确的是( )| A. | 若选择路线①,则赛车运动的路程最短 | |
| B. | 若选择路线②,则赛车的运动速率最小 | |
| C. | 若选择路线③,则赛车运动的时间最短 | |
| D. | 在三条路线的圆弧上,赛车的向心加速度大小都相等 |

17.关于摩擦力,有人总结了“四条不一定”,其中说法错误的是( )
| A. | 摩擦力的方向不一定与物体的运动方向相同 | |
| B. | 静摩擦力的方向不一定与运动方向共线 | |
| C. | 受静摩擦力或滑动摩擦力的物体不一定静止或运动 | |
| D. | 静摩擦力一定是阻力,滑动摩擦力不一定是阻力 |
14.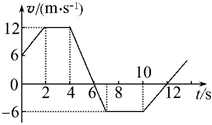 物体沿一条东西方向的水平线做直线运动,取向东为运动的正方向,其速度-时间图象如图所示,下列说法中正确的是( )
物体沿一条东西方向的水平线做直线运动,取向东为运动的正方向,其速度-时间图象如图所示,下列说法中正确的是( )
物体沿一条东西方向的水平线做直线运动,取向东为运动的正方向,其速度-时间图象如图所示,下列说法中正确的是( )| A. | 0~2s内,加速度为6 m/s2 | |
| B. | 0~6s内,物体运动的位移54m | |
| C. | 6~7s内,做速度方向向西的加速运动 | |
| D. | 10~12s内,做速度方向向东的加速运动 |
15.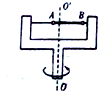 如图所示,两物块A、B套在水平粗糙的CD杆上,并用不可伸长的轻绳连接,整个装置能绕过CD中点的轴OO1转动,已知两物块质量相等,杆CD对物块A、B的最大静摩擦力大小相等,开始时绳子处于自然长度(绳子恰好伸直但无弹力),物块B到OO1轴的距离为物块A到OO1轴的距离的两倍,现让该装置从静止开始转动,使转速逐渐慢慢增大,在从绳子处于自然长度到两物块A、B即将滑动的过程中,下列说法正确的是( )
如图所示,两物块A、B套在水平粗糙的CD杆上,并用不可伸长的轻绳连接,整个装置能绕过CD中点的轴OO1转动,已知两物块质量相等,杆CD对物块A、B的最大静摩擦力大小相等,开始时绳子处于自然长度(绳子恰好伸直但无弹力),物块B到OO1轴的距离为物块A到OO1轴的距离的两倍,现让该装置从静止开始转动,使转速逐渐慢慢增大,在从绳子处于自然长度到两物块A、B即将滑动的过程中,下列说法正确的是( )
如图所示,两物块A、B套在水平粗糙的CD杆上,并用不可伸长的轻绳连接,整个装置能绕过CD中点的轴OO1转动,已知两物块质量相等,杆CD对物块A、B的最大静摩擦力大小相等,开始时绳子处于自然长度(绳子恰好伸直但无弹力),物块B到OO1轴的距离为物块A到OO1轴的距离的两倍,现让该装置从静止开始转动,使转速逐渐慢慢增大,在从绳子处于自然长度到两物块A、B即将滑动的过程中,下列说法正确的是( )| A. | A受到的静摩擦力一直增大 | |
| B. | B受到的静摩擦力先增大,后保持不变 | |
| C. | A受到的静摩擦力是先增大后减小再增大 | |
| D. | A受到的合外力先增大,后保持不变 |