题目内容
13.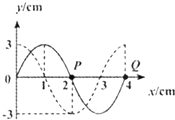 一横波在某时刻f的波形如图中实线所示.经过时间0.6s后波形曲线如图中虚线所示,已知波的周期大于0.6s.在这段时间内质点P通过的路程为0.09cm,则该波的波速为( )
一横波在某时刻f的波形如图中实线所示.经过时间0.6s后波形曲线如图中虚线所示,已知波的周期大于0.6s.在这段时间内质点P通过的路程为0.09cm,则该波的波速为( )| A. | 0.05m/s | B. | 0.10m/s | C. | 0.20m/s | D. | 0.30m/s |
分析 根据在这段时间内质点P通过的路程为0.09cm,振幅是3cm求出周期,再根据图象得出波长,从而根据$v=\frac{λ}{T}$求解波速.
解答 解:在这段时间内质点P通过的路程为0.09cm,振幅A=3cm,则振动了3A,即$\frac{3}{4}T$,
所以$\frac{3}{4}T$=0.6s,解得:T=0.8s
根据图象可知,波长λ=4cm=0.04m,
则波速v=$\frac{λ}{T}=\frac{0.04}{0.8}=0.05m/s$
故选:A
点评 本题关键是根据P点的路程与振幅的关系求出周期,再根据波速与波长、周期的关系求解,难度不大,属于基础题.

练习册系列答案
 课堂练加测系列答案
课堂练加测系列答案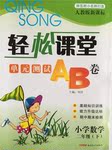 轻松课堂单元测试AB卷系列答案
轻松课堂单元测试AB卷系列答案
相关题目
3.类比是一种有效的学习方法,通过归类和比较,有助于掌握新知识,提高学习效率.在类比过程中,既要找出共同之处,又要抓住不同之处.某同学对机械波和电磁波进行类比,提出下列四点结论.则其中正确的是( )
| A. | 机械波既有横波又有纵波,而电磁波只有纵波 | |
| B. | 机械波的传播必须依赖于介质,而电磁波的传播出同样依赖介质 | |
| C. | 机械波的频率、波长和波速三者满足的关系,对电磁波也适用 | |
| D. | 机械波都能产生干涉和衍射现象,而电磁波不能产生干涉和衍射现象 |
4. 如图所示,物体A、B通过细绳及轻弹簧连接于轻滑轮两侧,物体A、B的质量分别为m、2m.开始以手托住物体A,绳恰好伸直,弹簧处于原长状态,A距离地面高度为h.放手后A从静止开始下落,在A下落至地面前的瞬间物体B恰好对地面无压力,(不计滑轮处的摩擦)则下列说法正确的是( )
如图所示,物体A、B通过细绳及轻弹簧连接于轻滑轮两侧,物体A、B的质量分别为m、2m.开始以手托住物体A,绳恰好伸直,弹簧处于原长状态,A距离地面高度为h.放手后A从静止开始下落,在A下落至地面前的瞬间物体B恰好对地面无压力,(不计滑轮处的摩擦)则下列说法正确的是( )
如图所示,物体A、B通过细绳及轻弹簧连接于轻滑轮两侧,物体A、B的质量分别为m、2m.开始以手托住物体A,绳恰好伸直,弹簧处于原长状态,A距离地面高度为h.放手后A从静止开始下落,在A下落至地面前的瞬间物体B恰好对地面无压力,(不计滑轮处的摩擦)则下列说法正确的是( )| A. | 在A下落至地面前的过程中物体B始终处于平衡状态 | |
| B. | 在A下落至地面前的过程中A的重力势能转化为弹簧弹性势能 | |
| C. | 在A下落至地面前的过程中A物体始终处于失重状态 | |
| D. | A落地前的瞬间加速度为g,方向向上 |

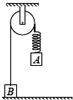
8. 某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力.将小车放置在导轨上,轻推小车,使之运动.可以通过小车经过两光电门的时间是否相等判断小车正好做匀速运动.
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离;
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.(1)实验主要步骤如下:
| 次数 | M/kg | |v22-v12|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.22 | W3 |
| 4 | 1.00 | 2.40 | 1.20 | 2.42 | 1.21 |
| 5 | 1.00 | 2.84 | 1.42 | 2.86 | 1.43 |
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离;
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
18.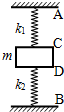 如图所示,两根轻弹簧AC和BD,它们的劲度系数分别为k1和k2,它们的C、D端分别固定在质量为m的物体上,A、B端分别固定在支架和正下方地面上,当物体m静止时,上方的弹簧处于原长;若将物体的质量变为3m,仍在弹簧的弹性限度内,当物体再次静止时,其相对第一次静止时位置下降了( )
如图所示,两根轻弹簧AC和BD,它们的劲度系数分别为k1和k2,它们的C、D端分别固定在质量为m的物体上,A、B端分别固定在支架和正下方地面上,当物体m静止时,上方的弹簧处于原长;若将物体的质量变为3m,仍在弹簧的弹性限度内,当物体再次静止时,其相对第一次静止时位置下降了( )
如图所示,两根轻弹簧AC和BD,它们的劲度系数分别为k1和k2,它们的C、D端分别固定在质量为m的物体上,A、B端分别固定在支架和正下方地面上,当物体m静止时,上方的弹簧处于原长;若将物体的质量变为3m,仍在弹簧的弹性限度内,当物体再次静止时,其相对第一次静止时位置下降了( )| A. | mg$\frac{{k}_{1}+{k}_{2}}{{k}_{1}{k}_{2}}$ | B. | 2mg$\frac{{k}_{1}+{k}_{2}}{{k}_{1}{k}_{2}}$ | ||
| C. | 2mg$\frac{1}{{k}_{1}+{k}_{2}}$ | D. | mg$\frac{1}{{k}_{1}+{k}_{2}}$ |
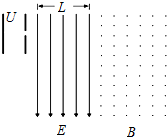 如图,让一价氢离子,一价氦离子和二价氦离子的混合物经过电压为U的加速电场由静止开始加速,垂直进入场强为E,宽度为L的偏转电场,之后进入磁感强度为B,方向垂直纸面向外的匀强磁场.试求:(已知氢的质量为m0,氦的质量为4m0,元电荷的电荷量为e)
如图,让一价氢离子,一价氦离子和二价氦离子的混合物经过电压为U的加速电场由静止开始加速,垂直进入场强为E,宽度为L的偏转电场,之后进入磁感强度为B,方向垂直纸面向外的匀强磁场.试求:(已知氢的质量为m0,氦的质量为4m0,元电荷的电荷量为e)
2.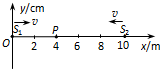 如图所示,均匀介质中两波源S1、S2,分别位于x轴上x1=0、x2=10m处,在t=0时刻同时从各自平衡位置开始沿y轴正方向做简谐运动,周期均为T=1s,产生的机械波的传播速度均为v=4m/s,振幅均为A=2cm.质点P位于x轴上xp=4m处,设质点P从t=0到t=2.5s内通过的路程为L,在t=3.25s时刻的位置为y,则( )
如图所示,均匀介质中两波源S1、S2,分别位于x轴上x1=0、x2=10m处,在t=0时刻同时从各自平衡位置开始沿y轴正方向做简谐运动,周期均为T=1s,产生的机械波的传播速度均为v=4m/s,振幅均为A=2cm.质点P位于x轴上xp=4m处,设质点P从t=0到t=2.5s内通过的路程为L,在t=3.25s时刻的位置为y,则( )
如图所示,均匀介质中两波源S1、S2,分别位于x轴上x1=0、x2=10m处,在t=0时刻同时从各自平衡位置开始沿y轴正方向做简谐运动,周期均为T=1s,产生的机械波的传播速度均为v=4m/s,振幅均为A=2cm.质点P位于x轴上xp=4m处,设质点P从t=0到t=2.5s内通过的路程为L,在t=3.25s时刻的位置为y,则( )| A. | L=4 cm | B. | L=12 cm | C. | y=2 cm | D. | y=-2 cm |
3.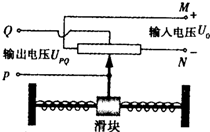 导弹制导方式很多,惯性制导系统是其中的一种,该系统的重要元件之一是加速度计,如图所示.沿导弹长度方向安装的固定光滑杆上套一质量为m的绝缘滑块,分别与劲度系数均为k的轻弹簧相连,两弹簧另一端与固定壁相连.当弹簧为原长时,固定在滑块上的滑片停在滑动变阻器(电阻总长为L)正中央,M、N两端输入电压为U0,P、Q两端输出电压UPQ=0.系统加速时滑块移动,滑片随之在变阻器上自由滑动,UPQ相应改变,然后通过控制系统进行制导.设某段时间导弹沿水平方向运动,滑片向左移动,UPQ=$\frac{1}{4}$U0,则这段时间导弹的加速度( )
导弹制导方式很多,惯性制导系统是其中的一种,该系统的重要元件之一是加速度计,如图所示.沿导弹长度方向安装的固定光滑杆上套一质量为m的绝缘滑块,分别与劲度系数均为k的轻弹簧相连,两弹簧另一端与固定壁相连.当弹簧为原长时,固定在滑块上的滑片停在滑动变阻器(电阻总长为L)正中央,M、N两端输入电压为U0,P、Q两端输出电压UPQ=0.系统加速时滑块移动,滑片随之在变阻器上自由滑动,UPQ相应改变,然后通过控制系统进行制导.设某段时间导弹沿水平方向运动,滑片向左移动,UPQ=$\frac{1}{4}$U0,则这段时间导弹的加速度( )
导弹制导方式很多,惯性制导系统是其中的一种,该系统的重要元件之一是加速度计,如图所示.沿导弹长度方向安装的固定光滑杆上套一质量为m的绝缘滑块,分别与劲度系数均为k的轻弹簧相连,两弹簧另一端与固定壁相连.当弹簧为原长时,固定在滑块上的滑片停在滑动变阻器(电阻总长为L)正中央,M、N两端输入电压为U0,P、Q两端输出电压UPQ=0.系统加速时滑块移动,滑片随之在变阻器上自由滑动,UPQ相应改变,然后通过控制系统进行制导.设某段时间导弹沿水平方向运动,滑片向左移动,UPQ=$\frac{1}{4}$U0,则这段时间导弹的加速度( )| A. | 方向向右,大小为$\frac{kL}{2m}$ | B. | 方向向左,大小为$\frac{kL}{2m}$ | ||
| C. | 方向向右,大小为$\frac{kL}{4m}$ | D. | 方向向左,大小为$\frac{kL}{4m}$ |