题目内容
某探究学习小组的同学欲验证“动能定理”,他们在实验室组装了一套如图1所示的装置:水平轨道上安装两个光电门,小车上固定有力传感器和挡光板,细线一端与力传感器连接另一端跨过定滑轮挂上砝码盘.实验时,保持轨道水平,通过调整砝码盘里砝码的质量让小车做匀速运动实现平衡摩擦力.

①该实验是否需要满足砝码和砝码盘的总质量远小于小车的质量?
(回答“是”或“否”)
②实验需要用游标卡尺测量挡光板的宽度l,如图所示l=
③实验获得以下测量数据:小车、传感器和挡光板的总质量M,平衡摩擦力时砝码和砝码盘的总质量m0,挡光板的宽度l,光电门1和光电门2的中心距离s,某次实验过程:力传感器的读数F,小车通过光电门1和光电门2的挡光时间分别为t1、t2.小车通过光电门2后砝码盘才落地.该实验需验证的表达式是
④若利用该实验装置验证“牛顿第二定律”.控制小车的质量不变,通过改变砝码盘里砝码的质量重复实验,探究合外力和加速度的关系.下列图象用力传感器的示数F为横坐标,可以表示该实验结果的是

⑤若用该实验装置,通过多次改变小车的质量探究质量和加速度的关系,以下说法正确的是
A、需要控制力传感器的读数F不变
B、需要控制砝码盘和砝码的总质量不变
C、需要控制小车所受的合外力不变,因此需要改变砝码盘和砝码的总质量,力传感器的读数F也会发生改变
D、以上说法都不对.
①该实验是否需要满足砝码和砝码盘的总质量远小于小车的质量?
(回答“是”或“否”)
否
否
;②实验需要用游标卡尺测量挡光板的宽度l,如图所示l=
5.50
5.50
mm;③实验获得以下测量数据:小车、传感器和挡光板的总质量M,平衡摩擦力时砝码和砝码盘的总质量m0,挡光板的宽度l,光电门1和光电门2的中心距离s,某次实验过程:力传感器的读数F,小车通过光电门1和光电门2的挡光时间分别为t1、t2.小车通过光电门2后砝码盘才落地.该实验需验证的表达式是
Fs=
M(
)2-
M(
)2
| 1 |
| 2 |
| l |
| t2 |
| 1 |
| 2 |
| l |
| t1 |
Fs=
M(
)2-
M(
)2
.| 1 |
| 2 |
| l |
| t2 |
| 1 |
| 2 |
| l |
| t1 |
④若利用该实验装置验证“牛顿第二定律”.控制小车的质量不变,通过改变砝码盘里砝码的质量重复实验,探究合外力和加速度的关系.下列图象用力传感器的示数F为横坐标,可以表示该实验结果的是
B
B
⑤若用该实验装置,通过多次改变小车的质量探究质量和加速度的关系,以下说法正确的是
A
A
A、需要控制力传感器的读数F不变
B、需要控制砝码盘和砝码的总质量不变
C、需要控制小车所受的合外力不变,因此需要改变砝码盘和砝码的总质量,力传感器的读数F也会发生改变
D、以上说法都不对.
分析:①该实验中由于已经用传感器测出绳子拉力大小,故不需要满足砝码和砝码盘的总质量远小于小车的质量.
②游标卡尺读数的方法是主尺读数加上游标读数,不需估读.游标的零刻度线超过主尺上的刻度数为主尺读数,游标读数等于分度乘以对齐的根数.
③光电门测速度的原理是用平均速度来代替瞬时速度,根据功能关系可以求出需要验证的关系式.
④由F=ma可知,保持m不变,a-F图象为过原点的直线.
⑤该实验中变量比较多,因此在进行探究时,采用“控制变量法”即先保持一个变量不变,看另外两个变量之间的关系.
②游标卡尺读数的方法是主尺读数加上游标读数,不需估读.游标的零刻度线超过主尺上的刻度数为主尺读数,游标读数等于分度乘以对齐的根数.
③光电门测速度的原理是用平均速度来代替瞬时速度,根据功能关系可以求出需要验证的关系式.
④由F=ma可知,保持m不变,a-F图象为过原点的直线.
⑤该实验中变量比较多,因此在进行探究时,采用“控制变量法”即先保持一个变量不变,看另外两个变量之间的关系.
解答:解:①该实验中由于已经用传感器测出绳子拉力大小,不是将砝码和砝码盘的重力作为小车的拉力,故不需要满足砝码和砝码盘的总质量远小于小车的质量.
故答案为:否.
②游标卡尺的主尺读数为5mm,游标读数等于0.05×10mm=0.50mm,所以最终读数为:5mm+0.50mm=5.50mm.
故答案为:5.50.
③由于光电门的宽度d很小,所以我们用很短时间内的平均速度代替瞬时速度.
滑块通过光电门1速度为:v1=
滑块通过光电门2速度为:v2=
根据功能关系需要验证的关系式为:(F-m0g)s=
M
-
M
即:(F-m0g)s=
M(
)2-
M(
)2.
故答案为:(F-m0g)s=
M(
)2-
M(
)2..
④由于该实验中直接测出了拉力F,因此不存在系统误差,由F-m0g=Ma可知,当M不变时,a-F图象为不过原点的直线,与横坐标的交点为m0g,故ACD错误,B正确.
故选:B.
⑤该实验采用了“控制变量法”,因此要探究质量和加速度的关系,需要控制拉力F不变,根据牛顿第二定律可知,要控制F不变,当改变小车的质量的同时需要改变砝码盘和砝码的总质量,故BCD错误,A正确.
故选:A.
故答案为:否.
②游标卡尺的主尺读数为5mm,游标读数等于0.05×10mm=0.50mm,所以最终读数为:5mm+0.50mm=5.50mm.
故答案为:5.50.
③由于光电门的宽度d很小,所以我们用很短时间内的平均速度代替瞬时速度.
滑块通过光电门1速度为:v1=
| l |
| t1 |
滑块通过光电门2速度为:v2=
| l |
| t2 |
根据功能关系需要验证的关系式为:(F-m0g)s=
| 1 |
| 2 |
| v | 2 2 |
| 1 |
| 2 |
| v | 2 1 |
即:(F-m0g)s=
| 1 |
| 2 |
| l |
| t2 |
| 1 |
| 2 |
| l |
| t1 |
故答案为:(F-m0g)s=
| 1 |
| 2 |
| l |
| t2 |
| 1 |
| 2 |
| l |
| t1 |
④由于该实验中直接测出了拉力F,因此不存在系统误差,由F-m0g=Ma可知,当M不变时,a-F图象为不过原点的直线,与横坐标的交点为m0g,故ACD错误,B正确.
故选:B.
⑤该实验采用了“控制变量法”,因此要探究质量和加速度的关系,需要控制拉力F不变,根据牛顿第二定律可知,要控制F不变,当改变小车的质量的同时需要改变砝码盘和砝码的总质量,故BCD错误,A正确.
故选:A.
点评:了解光电门测量瞬时速度的原理,实验中我们要清楚研究对象和研究过程,对于系统我们要考虑全面,同时明确实验原理是解答实验问题的前提.

练习册系列答案
相关题目
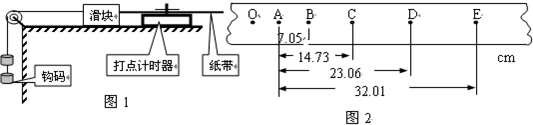
 某探究学习小组的同学欲以如图装置中的滑块为对象验证“动能定理”,他们在实验室组装了一套如图所示的装置,另外他们还找到了打点计时器所用的学生电源、导线、复写纸、纸带、小木块、细沙、垫块.当滑块连接上纸带,用细线通过滑轮挂上空的小沙桶时,释放小桶,滑块处于静止状态.若你是小组中的一位成员,要完成该项实验,则:
某探究学习小组的同学欲以如图装置中的滑块为对象验证“动能定理”,他们在实验室组装了一套如图所示的装置,另外他们还找到了打点计时器所用的学生电源、导线、复写纸、纸带、小木块、细沙、垫块.当滑块连接上纸带,用细线通过滑轮挂上空的小沙桶时,释放小桶,滑块处于静止状态.若你是小组中的一位成员,要完成该项实验,则: