题目内容
某同学将力传感器固定在小车上,然后把绳的一端固定在传感器拉钩上,用来测量绳对小车的拉力,探究在小车及传感器总质量不变时加速度跟它们所受拉力的关系,根据所测数据在坐标系中作出了如图所示的a-F图象.
(1)图线不过坐标原点的原因是 ;
(2)本实验中是否仍需要砂和桶的总质量远小于小车和传感器的总质量______(填“是”或“否”);
(3)由图象求出小车和传感器的总质量为________ kg.
(1)没有平衡摩擦或平衡摩擦不足 (2)否 (3)1kg
解析试题分析:(1)从图象可以看出,当有了一定的拉力F时,小车的加速度仍然是零,小车没动说明小车的合力仍然是零,说明说明没有平衡摩擦力,或者是平衡摩擦力了但是平衡的还不够,所以图线不通过坐标原点的原因是实验前该同学没有平衡摩擦力,或平衡摩擦不足.
(2)该实验中由于已经用传感器测出绳子拉力大小,不是将砂和桶的重力作为小车的拉力,故不需要满足砂和桶的总质量远小于小车的和传感器的总质量.
(3)设小车的和传感器的总质量为M,由牛顿第二定律得: ,所以a-F图象中的斜率表示质量的倒数,由图可知,
,所以a-F图象中的斜率表示质量的倒数,由图可知, ,所以质量
,所以质量
考点:本题考查探究加速度与物体质量、物体受力的关系,同时考查考生对实验数据的处理方法,及试验条件的掌握和平衡摩擦力的方法.

练习册系列答案
相关题目
一物理兴趣小组用以下装置测量滑块与长为L=1m的轨道之间的滑动摩擦因数以及探究滑块在沿轨道向上运动时所受合力做功与动能变化的关系。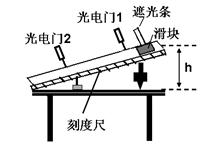
(1) 测量滑块与轨道之间的滑动摩擦因数。
轨道上安装有两个光电门,其中光电门1的位置可移动。当一带有宽度为d=1cm的遮光条的滑块自轨道上滑下时,与两个光电门都相连的计时器可以显示出遮光条通过光电门1、2所用的时间分别为Δt1、Δt2。使滑块以一定初速度下滑,调节轨道右端距桌面的高度,最终使Δt1 =Δt2 ,并用米尺测量出轨道右端距桌面的高度h="25cm" ;则滑块与轨道之间的滑动摩擦因数 μ=________;
(2) 探究滑块在沿轨道向上运动时所受合力做功与动能变化的关系。
撤掉光电门2,保持实验(1)中h不变,在轨道右端安装一光滑的定滑轮,用细绳连接滑块与力传感器(与电脑相连,其所受拉力可直接由电脑显示),细线横跨过定滑轮,传感器连接一重物,如图所示,操作:遮光条与光电门1距离x可从刻度尺上读出,通过改变光电门的位置,来获得多组数据;每次均由轨道底(低)(此处最好改为同一位置)端无初速度释放滑块,与光电门相连的计时器显示出每次遮光条通过光电门1所用的时间Δt,并做好记录,如下表所示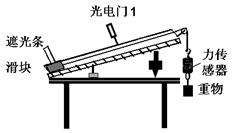
| | 第一次 | 第二次 | 第三次 | 第四次 |
| x(cm) | 10.0 | 22.6 | 50.0 | 62.4 |
| Δt(s) | 0.0101 | 0.0067 | 0.0045 | 0.0040 |
| V(m/s) | 0.99 | 1.50 | 2.24 | |
 = ________;(保留三位有效数字)
= ________;(保留三位有效数字)②要验证受合力做功与动能变化的关系,还需要测出的物理量是( )
A.力学传感器的质量
B . 滑块与遮光条的质量
C.重物的质量
D. 滑块每次从静止开始滑到光电门所用的时间
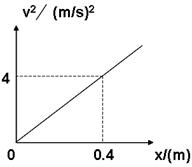
③一位同学每次实验得到力传感器的数值都为19.8N,并根据以上图表中数据做出了v2----x图像,如图所示。根据图像请你求出滑块的质量M=________;(重力加速度g=9.8m/s2)


 =________.
=________.
在《用伏安法测量电池的电动势和内电阻》的实验中使用到的仪器和器材有:电池组、滑动变阻器、伏特表、安培表、电键和导线等。 实验得到下面的一组数据
| 次数 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| U(V) | 1.37 | 1.32 | 1.24 | 1.20 | 1.18 | 1.10 | 1.05 |
| I(A) | 0.12 | 0.20 | 0.31 | 0.38 | 0.42 | 0.50 | 0.57 |
(2)请根据数据在方格纸中做出U-I图象,并由图象求出电池组的电动势和内电阻。


由图线可求得电池电动势为_____V,内阻等于_____Ω。





