题目内容
【题目】如图甲所示,气垫导轨上质量为M的滑块通过轻质细绳绕过滑轮与质量为m的钩码相连,绳子的悬挂点与拉力传感器相连,遮光条宽度为d.气源开通后,滑块在绳子拉力的作用下由静止释放,遮光条通过光电门的时间为Δt,拉力传感器的读数为F.不计滑轮质量、不计滑轮轴、滑轮与轻质细绳之间的摩擦.
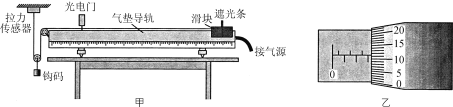
(1) 某同学用螺旋测微器测遮光条宽度,螺旋测微器示数如图乙所示,d=________mm.
(2) 某学习小组的同学欲探究绳子拉力对滑块做功与滑块动能变化的关系,记录滑块释放时遮光条与光电门的距离L及其通过光电门的时间Δt,得到一系列L和Δt的数据,通过图象法处理数据时,为了获得线性图象应作________(选填“![]() “
“![]() ”或“
”或“![]() ”)图象,该图象的斜率k=________(用题中字母表示).
”)图象,该图象的斜率k=________(用题中字母表示).
(3) 该小组同学利用所测数据计算发现:绳子拉力F做的功总小于滑块动能的变化量.若实验中数据的测量均是准确的,分析出现这一意外情况的可能原因是________.
A. “没有满足钩码质量m远小于滑块质量M”这一条件
B. 滑块运动过程中存在阻力
C. 没有调节气垫导轨水平
D. 拉滑块的细绳与气垫导轨不平行
(4) 在排除意外情况后,用上述装置和相应数据研究系统(含滑块、钩码)机械能是否守恒,若运动过程中系统机械能守恒,则满足下列________关系式.
A. ![]() B.
B. ![]()
C. ![]() D.
D. ![]()
【答案】3.122~3.115 ![]()
![]() C D
C D
【解析】
(1)根据螺旋测微器的读数原理可知,![]()
(2)根据牛顿第二定律可得:F=Ma,再结合运动学规律![]() ,
,![]() ,联立可得
,联立可得![]() ,
,![]() ,为了获得线性图像,应作
,为了获得线性图像,应作![]() 图,且斜率k表示
图,且斜率k表示![]()
(3)拉力做的功比动能变化小,根据动能定理可知,肯定有另外一个力做正功,分析可知C正确。
A、实验是通过传感器测量力的大小,无需满足钩码质量m远小于滑块质量M
B、实验中使用的是气垫导轨,可认为没有摩擦力
D、拉滑块的细绳与气垫导轨不平行的话,拉力此时是变力,但是只有拉力做功,所以拉力做的功应该等于动能变化
(4)连接钩码的为动滑轮,结合动滑轮的规律,钩码下降的高度为滑块的一半,钩码的速度也是滑块的一半,所以重力势能变化量为![]() ,动能变化量为
,动能变化量为![]() ,验证机械能是否守恒,主要是看两者数值是否相等,D正确
,验证机械能是否守恒,主要是看两者数值是否相等,D正确