题目内容
19.一做匀变速直线运动的质点,它的位移与时间的关系式为x=t+0.5t2(x与t的单位分别是m和s),则质点的初速度和加速度分别为1m/s,1m/s2.分析 根据匀变速直线运动的位移时间公式$x={v}_{0}t+\frac{1}{2}a{t}^{2}$,通过比较得出质点的初速度和加速度.
解答 解:根据匀变速直线运动的位移时间公式得,$x={v}_{0}t+\frac{1}{2}a{t}^{2}=t+0.5{t}^{2}$,则质点的初速度v0=1m/s,加速度a=1m/s2.
故答案为:1,1.
点评 解决本题的关键知道匀变速直线运动的位移时间公式,并能灵活运用,知道运动学公式的矢量性,基础题.

练习册系列答案
 全优冲刺100分系列答案
全优冲刺100分系列答案 英才点津系列答案
英才点津系列答案
相关题目
 如图所示,在半径为R的圆形区域内有垂直纸面向里的匀强磁场,A、B、C为圆上的三点,OA水平,OC竖直,OB与OA的夹角为120°,一个质量为m、电量为q的带负电粒子从A点沿AO方向以v0速度射入磁场,从B点射出磁场,不计带电粒子的重力,求:
如图所示,在半径为R的圆形区域内有垂直纸面向里的匀强磁场,A、B、C为圆上的三点,OA水平,OC竖直,OB与OA的夹角为120°,一个质量为m、电量为q的带负电粒子从A点沿AO方向以v0速度射入磁场,从B点射出磁场,不计带电粒子的重力,求:
10.为了节能环保,一些公共场所使用光控开关控制照明系统.光控开关可采用光敏电阻来控制,光敏电阻是阻值随着光的照度而发生变化的元件(照度可以反映光的强弱,光越强照度越大,照度单位为1x).
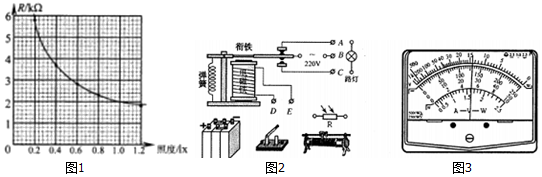
(1)某光敏电阻R在不同照度下的阻值如表,根据表中已知数据,在图1的坐标系中描绘出了阻值随照度变化的曲线.由图象可求出照度为1.0 x时的电阻约为2.0kΩ.
(2)如图2所示是街道路灯自动控制模拟电路,利用直流电源为电磁铁供电,利用照明电源为路灯供电.为达到天亮灯熄、天暗灯亮的效果,路灯应接在AB(填“AB”或“BC”)之间,请用笔画线代替导线,正确连接电路元件.
(3)用多用电表“×10Ω”档,按正确步骤测量图中电磁铁线圈电阻时,指针示数如图3所示,则线圈的电阻为140Ω,已知当线圈中的电流大于或等于2mA时,继电器的衔铁将被吸合.图中直流电源的电动势E=6V,内阻忽略不计,滑动变阻器有三种规格可供选择:R1(0-10Ω,2A)、R2(0-200Ω,1A)、R3(0-1750Ω,0.1A).要求天色渐暗照度降低至1.01x时点亮路灯,滑动变阻器应选择R3(填R1、R2、R3).为使天色更暗时才点亮路灯,应适当地减小(填“增大”或“减小”)滑动变阻器的电阻.
(1)某光敏电阻R在不同照度下的阻值如表,根据表中已知数据,在图1的坐标系中描绘出了阻值随照度变化的曲线.由图象可求出照度为1.0 x时的电阻约为2.0kΩ.
| 照度/1x | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 |
| 电阻/kΩ | 5.8 | 3.7 | 2.8 | 2.3 | 1.8 |
(3)用多用电表“×10Ω”档,按正确步骤测量图中电磁铁线圈电阻时,指针示数如图3所示,则线圈的电阻为140Ω,已知当线圈中的电流大于或等于2mA时,继电器的衔铁将被吸合.图中直流电源的电动势E=6V,内阻忽略不计,滑动变阻器有三种规格可供选择:R1(0-10Ω,2A)、R2(0-200Ω,1A)、R3(0-1750Ω,0.1A).要求天色渐暗照度降低至1.01x时点亮路灯,滑动变阻器应选择R3(填R1、R2、R3).为使天色更暗时才点亮路灯,应适当地减小(填“增大”或“减小”)滑动变阻器的电阻.
7.下列措施可以防止静电危害的是( )
| A. | 电工钳柄上套有绝缘胶套 | B. | 飞机的机轮上装有搭地线 | ||
| C. | 在高大的烟囱中安装静电除尘器 | D. | 印染车间中保持适当的湿度 |
14.下列几个关于力学问题的说法中正确的是( )
| A. | 米、千克、牛顿等都是国际单位制中的基本单位 | |
| B. | 同一物体运动快时和运动慢时惯性一样大 | |
| C. | 静止在水平面上的物体所受的重力与水平面给的支持力是一对相互作用力 | |
| D. | 放在斜面上的物体,其重力沿垂直斜面的分力就是物体对斜面的压力 |
4. 静电喷涂时,喷枪带负电,被喷工件带正电,喷枪喷出的涂料微粒带负电,假设微粒被喷出后只受静电力作用,最后吸附在工件表面,微粒在向工件靠近的过程中( )
静电喷涂时,喷枪带负电,被喷工件带正电,喷枪喷出的涂料微粒带负电,假设微粒被喷出后只受静电力作用,最后吸附在工件表面,微粒在向工件靠近的过程中( )
静电喷涂时,喷枪带负电,被喷工件带正电,喷枪喷出的涂料微粒带负电,假设微粒被喷出后只受静电力作用,最后吸附在工件表面,微粒在向工件靠近的过程中( )| A. | 一定沿着电场线运动 | B. | 所受电场力先减小后增大 | ||
| C. | 克服电场力做功 | D. | 电势能逐渐增大 |
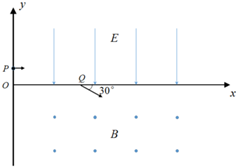 如图所示的xoy坐标系中,在第Ⅰ象限内存在沿y轴负向的匀强电场,第Ⅳ象限内存在垂直纸面向外的匀强磁场,一质量为m、电荷量为q的带正电粒子,从y轴上的P点垂直进入匀强电场,经过x轴上的Q点以速度v进入磁场,方向与x轴正向成30°.若粒子在磁场中运动后恰好能再回到电场,已知$\overrightarrow{OQ}$=3L,粒子的重力不计,电场强度E和磁感应强度B大小均求知,求
如图所示的xoy坐标系中,在第Ⅰ象限内存在沿y轴负向的匀强电场,第Ⅳ象限内存在垂直纸面向外的匀强磁场,一质量为m、电荷量为q的带正电粒子,从y轴上的P点垂直进入匀强电场,经过x轴上的Q点以速度v进入磁场,方向与x轴正向成30°.若粒子在磁场中运动后恰好能再回到电场,已知$\overrightarrow{OQ}$=3L,粒子的重力不计,电场强度E和磁感应强度B大小均求知,求
8.根据最新官方消息,中国火星探测任务基本确定,发射时间大致在2018年左右,若火星探测器在登陆火星之前需在靠近火星表面绕火星做匀速圆周运动,已知引力常量为G,探测器在火星表面附近绕火星做匀速圆周运动的角速度为ω,则火星的平均密度为( )
| A. | $\frac{3{ω}^{2}}{4πG}$ | B. | $\frac{2{ω}^{2}}{3πG}$ | C. | $\frac{{ω}^{2}}{2πG}$ | D. | $\frac{{ω}^{2}}{4πG}$ |
9. 如图所示,一个电阻为R的家用电炉和一个绕线电阻为r的电动机M并联接在电压恒定为U的电源上,电动机和电炉都正常工作,测得流经电炉和电动机的电流分别为I1、I2,电炉和电动机消耗的功率分别为P1、P2,产生的热功率分别为P3、P4,则下面关系中正确的是( )
如图所示,一个电阻为R的家用电炉和一个绕线电阻为r的电动机M并联接在电压恒定为U的电源上,电动机和电炉都正常工作,测得流经电炉和电动机的电流分别为I1、I2,电炉和电动机消耗的功率分别为P1、P2,产生的热功率分别为P3、P4,则下面关系中正确的是( )
如图所示,一个电阻为R的家用电炉和一个绕线电阻为r的电动机M并联接在电压恒定为U的电源上,电动机和电炉都正常工作,测得流经电炉和电动机的电流分别为I1、I2,电炉和电动机消耗的功率分别为P1、P2,产生的热功率分别为P3、P4,则下面关系中正确的是( )| A. | I2=$\frac{U}{r}$ | B. | P1<$\frac{{U}^{2}}{R}$ | C. | P2=UI2 | D. | P4=I${\;}_{2}^{2}$r |