搜索
题目内容
利用速度传感器与计算机结合,可以自动作出物体运动的图象。某同学在一次实验中得到的运动小车的速度-时间图象如图所示,以下说法错误的是
[ ]
A.小车先做加速运动,后做减速运动
B.小车运动的最大速度约为0.8m/s
C.小车的位移一定大于7m
D.小车做曲线运动
试题答案
相关练习册答案
D
练习册系列答案
口算题卡心算口算速算巧算系列答案
立体设计暑假初升高衔接版系列答案
培优新帮手暑假初升高衔接教程系列答案
英语活动手册系列答案
暑假作业快乐假期新疆青少年出版社系列答案
暑假衔接状元100分系列答案
课时优化状元练案系列答案
基础能力训练系列答案
创新思维同步双基双测AB卷系列答案
周报经典英语周报系列答案
相关题目
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小;
可以通过在小车上放置砝码来改变小车的质量,通过加减钩码的数量来改变拉力的大小.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M
1
,把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连,正确地连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,记录
细线拉力(或力传感器的示数)
细线拉力(或力传感器的示数)
及小车通过A、B时的速度;
③改变小车的质量或改变所挂钩码的数量,重复②的操作.
(2)表格中是他们测得的一组数据,其中M是M
1
与小车中砝码质量之和,|v
1
2
-v
2
2
|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表中的△E
3
=
0.600
0.600
J,W
3
=
0.610
0.610
J(结果保留三位有效数字).
(3)根据表格中的数据,请在图2所示方格纸上作出△E-W图线.
实验数据记录表格.
次数
M/kg
|v
1
2
-v
2
2
|/m
2
s
-2
△E/J
F/N
W/J
1
0.500
0.760
0.190
0.400
0.200
2
0.500
1.65
0.413
0.840
0.420
3
0.500
2.40
△E
3
1.220
W
3
4
1.000
2.40
1.20
2.420
1.21
5
1.000
2.84
1.42
2.860
1.43
某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
次数
M/kg
|
v
2
2
-
v
2
1
|
(m/s)
2
△E/J
F/N
W/J
1
0.500
0.760
0.190
0.600
0.300
2
0.500
1.65
0.413
1.040
0.520
3
0.500
2.40
△E
3
1.420
W
3
4
1.000
1.60
0.80
2.300
1.15
5
1.000
2.40
1.20
2.620
1.31
6
1.000
2.84
1.42
3.060
1.53
如表是他们测得的数据,其中M是小车、砝码和拉力传感器的总质量,
|
v
2
2
-
v
2
1
|
是两个速度传感器记录的速度的平方差,可以据此计算出M的动能变化量△E.F是拉力传感器受到的拉力,W是F在A、B间所做的功.
(1)根据测量数据计算,表格中△E
3
=
;W
3
=
.
(2)根据表中的数据,在坐标纸乙上标出△E
3
和W
3
对应的数据点,并作出△E-W图线.
(3)△E-W图线没有通过原点的原因可能是
.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M
1
,把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连,正确连接所需电路
②将小车停在C点,然后释放小车,小车在细线拉动下运动,记录
A
A
A.细线拉力及小车通过A、B时的速度
B.钩码的质量和小车的质量
C、钩码的质量及小车通过A、B时的速度
D、小车的质量和细线的长度
③在小车中增加砝码,或减少砝码,重复②的操作.
(2)表1是他们测得的一组数据,其中M是M
1
与小车中砝码质量m之和,|v
2
2
-v
2
1
|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所作的功.表格中△E
3
=
0.600
0.600
,W
3
=
0.610
0.610
.(结果保留三位有效数字)
表1 数据记录表
次数
M/kg
|v
2
2
-v
2
1
|/(m/s)
2
△E/J
F/N
W/J
1
0.500
0.760
0.190
0.400
0.200
2
0.500
1.65
0.413
0.840
0.420
3
0.500
2.40
△E
3
1.220
W
3
4
1.000
2.40
1.20
2.420
1.21
5
1.000
2.84
1.42
2.860
1.43
(3)根据表1提供的数据,请在方格纸上作出△E-W图线.
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或
改变钩码数量
改变钩码数量
,重复②的操作.
(2)下表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,|
v
2
2
-v
1
2
|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的△E
3
=
0.600
0.600
,W
3
=
0.610
0.610
.(结果保留三位有效数字)
次数
M/kg
|
v
2
2
-v
1
2
|/(m/s)
2
△E/J
F/N
W/J
1
0.500
0.760
0.190
0.400
0.200
2
0.500
1.65
0.413
0.840
0.420
3
0.500
2.40
△E3
1.220
W3
4
1.000
2.40
1.20
2.420
1.21
5
1.000
2.84
1.42
2.860
1.43
(3)根据表,我们在图中的方格纸上作出△E-W图线如图所示,它说明了
拉力(合力)所做的功近似等于物体动能的改变量
拉力(合力)所做的功近似等于物体动能的改变量
.
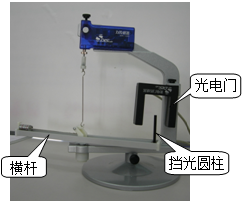
光电门传感器在很多实验中应用.光电门直接测量的物理量是
.它能测量瞬时速度的原理是
.
如图所示的实验装置中的横杆能够绕竖直轴旋转,在横杆的一端装有宽度为d=0.005m的竖直“挡光圆柱”.横杆在转动过程中,由于摩擦阻力的作用,横杆会越转越慢.某同学利用光电门研究“挡光圆柱”速度大小与横杆转动圈数n的关系.在一次实验中记录下横杆转动圈数n和每次挡光的时间t,并计算出“挡光圆柱”在该时刻的速度以及速度的平方(部分数据如表中所示).请计算表中当n=5时,v
2
=
m
2
/s
2
;如果继续测量“挡光圆柱”的速度,那么当n=15时,“挡光圆柱”的速度为
m/s.则“挡光圆柱”速度大小与横杆转动圈数n的关系为
.
n
t(10
-3
s)
v=d/t(m/s)
v
2
(m
2
/s
2
)
1
2.778
1.80
3.24
2
2.826
…
3.13
3
2.877
…
3.02
4
2.931
…
2.91
5
2.988
…
6
3.049
…
2.69
7
3.113
…
2.58
8
3.181
…
2.47
9
3.255
…
2.36
10
3.333
…
2.25
…
…
…
…
关 闭
试题分类
高中
数学
英语
物理
化学
生物
地理
初中
数学
英语
物理
化学
生物
地理
小学
数学
英语
其他
阅读理解答案
已回答习题
未回答习题
题目汇总
试卷汇总


 某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.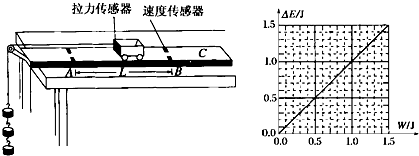
 光电门传感器在很多实验中应用.光电门直接测量的物理量是
光电门传感器在很多实验中应用.光电门直接测量的物理量是