题目内容
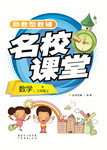
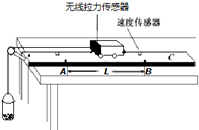
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
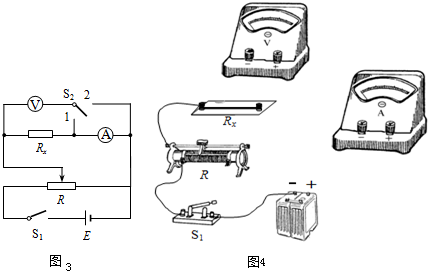
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连,正确连接所需电路
②将小车停在C点,然后释放小车,小车在细线拉动下运动,记录
A
A
A.细线拉力及小车通过A、B时的速度
B.钩码的质量和小车的质量
C、钩码的质量及小车通过A、B时的速度
D、小车的质量和细线的长度
③在小车中增加砝码,或减少砝码,重复②的操作.
(2)表1是他们测得的一组数据,其中M是M1与小车中砝码质量m之和,|v22-v21|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所作的功.表格中△E3=
0.600
0.600
,W3=0.610
0.610
.(结果保留三位有效数字)表1 数据记录表
| 次数 | M/kg | |v22-v21|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
分析:小车在钩码的作用下拖动纸带在水平面上做加速运动,通过速度传感器可算出A B两点的速度大小,同时利用拉力传感器测量出拉小车的力,从而由AB长度可求出合力做的功与小车的动能变化关系.
解答:解:(1)通过力传感器测出拉细线的力,以便求出合力做功.故A选项正确;
即使知道钩码的质量,也不能算出拉细线的力.原因是钩码处于加速运动,细线的拉力不等于钩码的重力.故C选项不正确;
BD两选项均没有测出两点速度,所以得出动能的变化.因此BD选项均不正确;
故选A
(2)由各组数据可见规律△E=
M(
-
)
可得△E3=0.600 J观察F-W数据规律可得数值上W3=
=0.610 J
(3)在方格纸上作出△E-W图线如图所示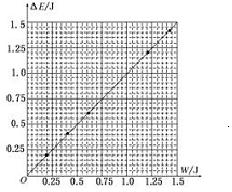
答案:(1)②选A (2)0.600 J 0.610 J (3)见上图
即使知道钩码的质量,也不能算出拉细线的力.原因是钩码处于加速运动,细线的拉力不等于钩码的重力.故C选项不正确;
BD两选项均没有测出两点速度,所以得出动能的变化.因此BD选项均不正确;
故选A
(2)由各组数据可见规律△E=
| 1 |
| 2 |
| V | 2 2 |
| V | 2 1 |
可得△E3=0.600 J观察F-W数据规律可得数值上W3=
| F |
| 2 |
(3)在方格纸上作出△E-W图线如图所示
答案:(1)②选A (2)0.600 J 0.610 J (3)见上图
点评:值得注意的是:钩码的重力不等于细线的拉力,同时学会分析实验数据从而得出规律.

练习册系列答案
 名校课堂系列答案
名校课堂系列答案
相关题目


 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
 某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与砂桶相连,用拉力传感器记录小车受到的拉力的大小.在滑板边的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.实验过程中不必要的是( )
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与砂桶相连,用拉力传感器记录小车受到的拉力的大小.在滑板边的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.实验过程中不必要的是( )| A、平衡摩擦力 | B、测量A、B两速度传感器间的距离L | C、测量砂及砂桶的总质量 | D、砂及砂桶的总质量远小于拉力传感器和小车的总质量 |