题目内容
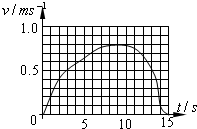 利用速度传感器与计算机结合,可以自动作出物体运动的图象.某同学在一次实验中得到的运动小车的速度-时间图象如图所示,出此可以知道( )
利用速度传感器与计算机结合,可以自动作出物体运动的图象.某同学在一次实验中得到的运动小车的速度-时间图象如图所示,出此可以知道( )分析:在速度--时间图象中,由图象的变化可判断物体的加速与减速;从峰值上可判断最大速度的大小;由图象和时间轴所围成的图形的面积是物体的位移,可看出物体的位移大小.
解答:解:
A、当t=9s时,小车的速度最大,最大值约为vmax≈0.8 m/s故A正确.
B、在v-t图中,图线与坐标轴所围的面积在数值上表示位移的大小,图中每小格的面积表示的位移大小为0.1m,总格数约为84格(大于半格计为一格,小于半格忽略不计),总位移8.4m,故B正确;
C、图象的斜率表示加速度,当速度到达最大时,斜率为零,加速度为零.故C正确.
D、v-t图中,v>0表示物体运动方向始终沿正方向,v<0表示物体运动方向始终沿负方向,所以速度图象表示物体做直线运动,故D错误.
故选ABC
A、当t=9s时,小车的速度最大,最大值约为vmax≈0.8 m/s故A正确.
B、在v-t图中,图线与坐标轴所围的面积在数值上表示位移的大小,图中每小格的面积表示的位移大小为0.1m,总格数约为84格(大于半格计为一格,小于半格忽略不计),总位移8.4m,故B正确;
C、图象的斜率表示加速度,当速度到达最大时,斜率为零,加速度为零.故C正确.
D、v-t图中,v>0表示物体运动方向始终沿正方向,v<0表示物体运动方向始终沿负方向,所以速度图象表示物体做直线运动,故D错误.
故选ABC
点评:在学习物理的过程中,借助于数学的函数图象分析物理问题,是学习物理的重要方法之一,体现了数形结合的思想.v--t图象是物理学中非常基础的一种图象,我们应充分利用图象的“轴、距、斜率、面、点、线”等量所代表的物理意义来解决问题.

练习册系列答案
 轻巧夺冠周测月考直通中考系列答案
轻巧夺冠周测月考直通中考系列答案
相关题目

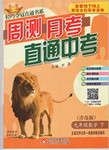
 某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.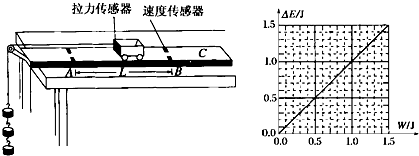
 光电门传感器在很多实验中应用.光电门直接测量的物理量是
光电门传感器在很多实验中应用.光电门直接测量的物理量是