题目内容
【题目】做俯卧撑运动的人可视为杠杆。如图所示,一同学重500N,P点为重心,他每次将身体撑起,肩部上升0.4m.某次测试中.他1min内完成30次俯卧撑。求:
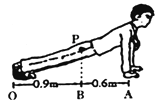
(1) 俯卧撑中的动力臂L1、阻力臂L2的大小。
(2)将身体匀速撑起,地面对双手的支持力。
(3)将身体撑起一次所做的功。
(4)该同学lmin内的功率.
【答案】(1)动力臂:1.5m 阻力臂:0.9m(2)300N(3)120J(4)60W
【解析】(1)动力臂OA=OB+AB=1.5m、阻力臂OB=0.9m.
(2)F1L1=F2L2
F1×1.5m=500N×0.9m
F1=300N,与支持力为一对相互作用力,故F1= F支=300N
(3)将身体撑起一次所做的功W=Fs=300N×0.4m=120J
(4)![]() 。
。
答:动力臂是1.5m,阻力臂是0.9m,双手对地面的压力是300N,身体撑起一次做的功是120J,1min内的功率是60W.

 同步轻松练习系列答案
同步轻松练习系列答案 课课通课程标准思维方法与能力训练系列答案
课课通课程标准思维方法与能力训练系列答案



【题目】在学习功的原理后,为了验证结论,小明找来杠杆和动滑轮做实验,记录数据如下:
记录 | 提升重物做功 | 动力做功 | ||||
物重/N | 高度/h | 功/J | 动力/N | 距离/m | 功/J | |
杠杆 | 10 | 2 | 4 | 0.5 | 2 | |
动滑轮 | 4 | 0.3 | 1.2 | 2.2 | 0.6 | 1.32 |
(1)将表中空的数字补充完整.
(2)他发现提升重物做功和动力做功在滑轮实验中不相等,原因是 .
(3)接着小明又做了探究“影响滑轮组机械效率高低的因素”的实验,他提出了下列假设: ①滑轮组机械效率高低可能与动滑轮重有关;
②滑轮组机械效率高低可能与被提物重有关;
③滑轮组机械效率高低可能与物体提升高度有关;
④滑轮组机械效率高低可能与承重绳子段数有关
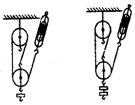
然后小明同学设计了如图所示的两个滑轮组,进行对比实验来验证提出的假设,则该实验验证的假设是 .
A.①
B.②
C.③
D.④

【题目】送餐机器人是智能商务电器的一种.正逐渐进入我们的生活,如图所示,是某餐厅出现的一款送餐机器人.该机器人送餐服务时在1min内沿直线匀速移动的距离为18m,若它在移动中所受阻力为200N,其他部分参数如表,请你完成下列问题:
身高 | 160cm |
体重 | 50Kg |
续航时间 | 12h |
托盘承受重力 | 5Kg |
与地面接触总面积 | 10﹣2m2 |

(1)求出其未服务静止时,它对水平地面的压强是多少?
(2)此机器人在送餐服务时运动的速度为多大?
(3)此机器人1min送餐服务过程中克服阻力所做的功及功率分别是多大?