��Ŀ����
����Ŀ��ÿ���3��22����28���ǡ��й�ˮ�ܡ���Ϊ��Ӧ��ˮ��ˮ�ĺ��٣�ij��ѧ������Ŀѧϰ��PBL��С�������ij����ӵ�ˮ���ܶ�ָ������˲�����

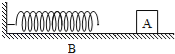
��1������ƽ����ˮƽ�����ϣ�����������ָ���ڷֶ�����࣬��ͼ����ʾ��Ҫʹ��ƽ����ƽ�⣬Ӧ���еIJ�����_____����ѡ��ƶ����롰����ƽ����ĸ������ֱ����ƽƽ�⡣
��2�������ձ��������̣�����������̣�ָ����ƫ��ֶ�����࣬������Ӧ��_____ֱ����ƽƽ�⣬��ÿ��ձ�������Ϊ30g��
��3������ˮ��Ʒ�����ձ��У���Һ�洦���A������ƽ����ձ��ͺ�ˮ����������ͼ����ʾ��Ϊ_____g��
��4�����ձ��к�ˮ��Ʒ�����������ձ���������ˮ�����ձ���_____������ƽ����ձ��ʹ���ˮ��������Ϊ74g��
��5������Ʒ��ˮ���ܶ�Ϊ_____kg/m3��
���𰸡�����ƽ����ĸ �ƶ����� 78.4 ���A 1.1��103
��������
��1��ʹ��ǰ�ĵ��ڣ��ţ�����ƽ�ŵ�ˮƽ�����ϣ��ƣ��������Ƶ�����������ߴ�����������ƽ����ĸ��ʹָ��ָ�ڷֶ��̵����ߴ���
��2��������������ʱ���������룬�ƶ����룬ʲôʱ�������룺����С����ָ����ƫ��ȡ����С����ָ����ƫ��
��3����4����5����ͼ�Ҷ����ձ��ͺ�ˮ����������֪���ձ������������ˮ���������������ˮ����������ˮ��������ڴ���ˮ��������������ܶȹ�ʽ���ˮ���ܶȡ�
��1������ƽ����ˮƽ�����ϣ��Ƚ�������ڱ����˵���̶��ߴ���������ָ���ڷֶ����������࣬Ҫʹ����ƽ�⣬Ӧ��ƽ����ĸ���ҵ��ڣ�
��2�������ձ��������̣�����������̣�ָ����ƫ��ֶ�����࣬��ʱ�ƶ����룬ֱ����ƽƽ�⣬���ձ�������m0=30g��
��3����ͼ�ң���ߵķֶ�ֵ��0.2g���ձ��ͺ�ˮ��������m��1=50g+20g+5g+3.4g=78.4g��
��4���ձ��к�ˮ��Ʒ�����������ձ���������ˮ�����ձ������A������ˮ��������ˮ�����������ƽ����ձ��ʹ���ˮ��������m����ˮ=74g��
��5����ˮ������m��ˮ=m��1��m0=78.4g��30g=48.4g��
����ˮ��������m����ˮ=m��2��m0=74g��30g=44g��
��ˮ�������
![]() ��
��
��ˮ���ܶȣ�
![]() ��
��

 �������Ͽ�ʱͬ��ѵ��ϵ�д�
�������Ͽ�ʱͬ��ѵ��ϵ�д� �������ͬ����ϰϵ�д�
�������ͬ����ϰϵ�д�