��Ŀ����
����Ŀ��С��ͬѧ����̽���ܸ�ƽ��������ʵ�顣
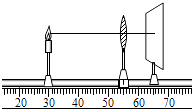
��1����̽�����ܸ�ƽ����������ʵ���У����ܸ���ʹ��ǰ����ҵͣ�Ӧ���ܸ���˵�ƽ����ĸ�����ڣ�ʹ�ܸ���λ��ƽ�⣬Ҳ��Ϊ�˷�����IJ�����
��2��С�����ĸ�������Ϊ0.5N�Ĺ�����ڸܸ����A������ɲ����ƹ��ڸܸ�B����ϸ���ϣ���ͼ��ʾ����Ҫʹ�ܸ�ƽ�⣬�ҵ��ɲ����Ƶ�ʾ����С����С��Ӧ�����������ɲ����ơ��ڴ�����£�С���������ɲ�����ʾ��Ϊ1N��С����С����ʵ�����ݷ�����õ��Ľ����ǣ�������������=�����������ۡ�����Ϊ���������͵ó������Ƿ���������������ɣ����������������ͼ�����߷��������Ա��ָܸ�����ͼ��λ��ƽ�⣬������Ƶ�ʾ������ѡ�����������䡱����С������
���𰸡�
��1����,ˮƽ,����
��2����ֱ����,������,ʵ�����ֻ��һ��,���۾���żȻ��,���
����������1���ܸ˵��Ҷ˵ͣ���һ���������۵ij˻���Ӧ��ƽ����ĸ������ڣ��Լ�С��һ������ۣ� �����ķ�������ֱ���µģ��ܸ�ֻ����ˮƽλ��ƽ��ʱ��֧�㵽���������ߵľ���������ڸܸ��ϣ����õ�����Ӧ�ܸ˵ij�����������������ȽϷ��㣻 ��2��������������һ��ʱ���ɸܸ�ƽ��������֪�������������ʱ��������С���������õ���֧��һ�����������Ϊ֧�㵽�������õ�ľ��룬��Ӧ��ܸ˴�ֱ��Ϊʹ������С��Ӧ��ֱ���������ɲ����ƣ�Ϊ�ó��ձ���ۣ�Ӧ���ж��ʵ�飬�������ʵ�����ݣ�С��ֻ������һ��ʵ�飬����һ��ʵ�����ݾ͵ó����ۣ�ʵ����۲������ձ��ԣ�ʵ����۲������� ���ɲ�������ֱ�������ܸ�ʱ����������OB�������ɲ�������б���ܸ�ʱ����������OD�������ۼ�С�������������۲��䣬��������
�ʴ�Ϊ����1����ˮƽ�����ۣ���2����ֱ���ϣ���������ʵ�����ֻ��һ�Σ����۾���żȻ�ԣ����.
�ܸ˵ĵ���Ҳ����ƽ���ƣ�Ӧ��ߵ�һ���ƶ�ƽ����ĸ�����ݸܸ�ƽ��������ұ��������۵ij˻�һ�����Ҫʹ����С������Ӧ������ɲ�������б���ܸ�ʱ�������ۼ�С�������������۲��䣬����������.

 С�����ϵ�д�
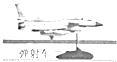
С�����ϵ�д�����Ŀ����ʵ�ֵ��¡�����ա����϶�ǧ����Ը��ͬʱ������һֱ��Ѱ���º������������������������룮2011��7�£��ҹ���̨������ơ��������ɵ�����DZˮ�����������ţ���ͼ��ʾ������Ҫ�����������±������ھ������š���DZ���ϸ������յ�һϵ�в�����˳�����5000m����������2012��6��3�ո��������ɺ�����7000m�������������Ͼ������¡����������Ϊ��ʵ�� 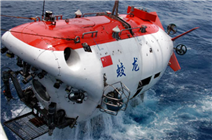
���8.2m ��3.0m ��3.4m |
��1��������ѧ����֪ʶ˵����DZˮ��������������������ʲô��
��2�����ݱ����ṩ����Ϣ������˵���������ʱ���������������ٳ��ܵ�ѹǿ�Ƕ��
��3�����������Ų��á���DZ��������DZ�ϸ����������������䱸4����ͬ��ѹ�ؿ飬���䵽���趨���ʱ������ж����2��ѹ�ؿ飬ʹ�䴦������״̬���Ӷ�ʵ�ָ���ʵ����ҵ�����Լ���С��������Ϊ���ʱ������ʹ���������������ʱʵ��������ֹ״̬������ˮ���ܶ�ȡ1.0��103kg/m3 �� gȡ10N/kg�������ܶ���7.9��103kg/m3 �� ����������1λС����