题目内容
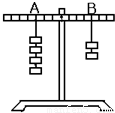
| 如图所示,杠杆平衡,若将两边的砝码数增加到原来的三倍, 则杠杆: |
|
A.不平衡 B.平衡 C.无法确定 |

试题答案
B
相关题目
 如图所示,杠杆平衡,若将两边的砝码数增加到原来的三倍,则杠杆(
如图所示,杠杆平衡,若将两边的砝码数增加到原来的三倍,则杠杆(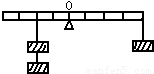
 如图所示,杠杆平衡,若将两边的砝码数增加到原来的三倍,则杠杆(________)
如图所示,杠杆平衡,若将两边的砝码数增加到原来的三倍,则杠杆(________)
 如图所示,杠杆处于平衡状态.根据问题作出下列选择:
如图所示,杠杆处于平衡状态.根据问题作出下列选择:
A.杠杆保持平衡 B.将顺时针转动
C.将逆时针转动 D.无法确定转动方向
(1)若将两边的钩码都向支点移动一格,那么观察到的现象将是(______);
(2)若在两边再各加挂一只钩码,那么观察到的现象将是(______).
查看习题详情和答案>>
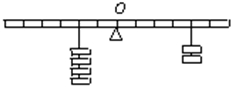 如图所示,把一根均匀的米尺,在中点O支起,两端各挂四个钩码和两个钩码,恰好使米尺平衡,按下列方式增减钩码或移动钩码,下列几种方式仍能保持米尺平衡的是
如图所示,把一根均匀的米尺,在中点O支起,两端各挂四个钩码和两个钩码,恰好使米尺平衡,按下列方式增减钩码或移动钩码,下列几种方式仍能保持米尺平衡的是C
C
.A.两边各加一个钩码
B.两边钩码各向外移动一格
C.左边增加一个钩码,右边向外移动一格
D.左右两边的钩码各减少一个
在研究杠杆平衡条件的实验中,总是使杠杆在
水平
水平
位置平衡,这是为了测量力臂
力臂
简便.在实验最初调节杠杆平衡时,发现杠杆右端高,这时应调节平衡螺母
平衡螺母
使它向右
右
移动,直到杠杆平衡.随后在支点两边挂上钩码以后,若杠杆右端下沉,为使杠杆平衡应将钩码
钩码
向左
左
移动. 如图所示,是小明探究“杠杆平衡条件”的步骤:
如图所示,是小明探究“杠杆平衡条件”的步骤:(1)实验中首先要调节杠杆两端的平衡螺母,其作用是调节杠杆在
水平
水平
位置平衡,这样做便于测量力臂的大小
力臂的大小
.若发现杠杆左端下倾,可将右端螺母向右
右
边旋转.(2)下面是小明的实验记录:
| 实验序号 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
1
1
的一组数据肯定是错误的.经检查,发现是测量动力臂时读错了,实际值比记录值大还是小?小
小
(选填:“大”或“小”);通过探究,应该得出的结论是:动力×动力臂=助力×阻力臂或F1L1=F2L
动力×动力臂=助力×阻力臂或F1L1=F2L
. 如图所示的杠杆处于平衡位置,则下列说法正确的是( )
如图所示的杠杆处于平衡位置,则下列说法正确的是( )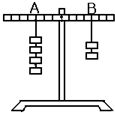 如图所示,是我们班的同学在做“研究杠杆的平衡条件”实验时,出现了以下几个问题情况,请你帮忙完善和纠正:
如图所示,是我们班的同学在做“研究杠杆的平衡条件”实验时,出现了以下几个问题情况,请你帮忙完善和纠正:
(1)小华的实验:
实验没有挂钩码时,若杠杆的左端下倾,则应将右端的平衡螺母______ (选填“左”或“右”)调节,使杠杆在水平位置平衡的目的是______.
(2)小明在进行实验时,实验步骤如下:
①把杠杆的中点支在支架上;
②把钩码挂在杠杆的两边,改变钩码的位置,使杠杆平衡;
③记下两边钩码受到的重力,并用刻度尺量出它们的力臂,并将数据填入表格内;
④改变力和力臂的数值,做三次实验;
⑤求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值.
小明同学漏掉了重要的步骤是______.如果实验中所用的钩码的质量都相同,则在图中的B处该挂______个钩码,才能使杠杆平衡.
(3)小梅同学的实验,则在将实验数据填入表格时,漏填了2个数据,请你根据杠杆平衡条件原理,帮忙补填进去.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 6 | 20 | 20 | 6 |
| 2 | ______ | 10 | 8 | 10 |
| 3 | 3 | 5 | ______ | 15 |
如图所示,是我们班的同学在做“研究杠杆的平衡条件”实验时,出现了以下几个问题情况,请你帮忙完善和纠正:
(1)小华的实验:
实验没有挂钩码时,若杠杆的左端下倾,则应将右端的平衡螺母______ (选填“左”或“右”)调节,使杠杆在水平位置平衡的目的是______.
(2)小明在进行实验时,实验步骤如下:
①把杠杆的中点支在支架上;
②把钩码挂在杠杆的两边,改变钩码的位置,使杠杆平衡;
③记下两边钩码受到的重力,并用刻度尺量出它们的力臂,并将数据填入表格内;
④改变力和力臂的数值,做三次实验;
⑤求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值.
小明同学漏掉了重要的步骤是______.如果实验中所用的钩码的质量都相同,则在图中的B处该挂______个钩码,才能使杠杆平衡.
(3)小梅同学的实验,则在将实验数据填入表格时,漏填了2个数据,请你根据杠杆平衡条件原理,帮忙补填进去.
 查看习题详情和答案>>
查看习题详情和答案>>
(1)小华的实验:
实验没有挂钩码时,若杠杆的左端下倾,则应将右端的平衡螺母______ (选填“左”或“右”)调节,使杠杆在水平位置平衡的目的是______.
(2)小明在进行实验时,实验步骤如下:
①把杠杆的中点支在支架上;
②把钩码挂在杠杆的两边,改变钩码的位置,使杠杆平衡;
③记下两边钩码受到的重力,并用刻度尺量出它们的力臂,并将数据填入表格内;
④改变力和力臂的数值,做三次实验;
⑤求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值.
小明同学漏掉了重要的步骤是______.如果实验中所用的钩码的质量都相同,则在图中的B处该挂______个钩码,才能使杠杆平衡.
(3)小梅同学的实验,则在将实验数据填入表格时,漏填了2个数据,请你根据杠杆平衡条件原理,帮忙补填进去.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 6 | 20 | 20 | 6 |
| 2 | ______ | 10 | 8 | 10 |
| 3 | 3 | 5 | ______ | 15 |
查看习题详情和答案>>