网址:http://m.1010jiajiao.com/timu_id_574323[举报]
①用摩擦过的玻璃棒或橡胶棒接触右侧极板使电容器带电.上移其中一极板,可观察到静电计指针偏转角
②关于本实验使用的静电计,以下说法正确的有
A.该静电计可以用电压表替代
B.该静电计可以用电流表替代
C.使用静电计的目的是观察电容器电压的变化情况
D.使用静电计的目的是观察电容器电量的变化情况
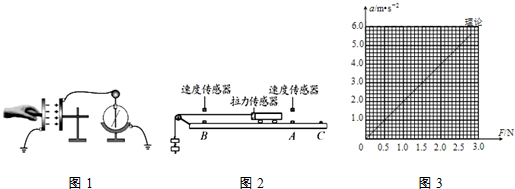
(2)图2为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小.在长木板上相距L=48.0cm的A、B两处各安装一个速度传感器,分别记录小车到达A、B时的速率.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做
C.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
D.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
E.改变所挂钩码的数量,重复步骤D的操作.
| 次数 | F(N) |
|
a(m/s2) | ||||
| 1 | 0.60 | 0.77 | 0.80 | ||||
| 2 | 1.04 | 1.61 | 1.68 | ||||
| 3 | 1.42 | 2.34 | |||||
| 4 | 2.00 | 3.48 | 3.63 | ||||
| 5 | 2.62 | 4.65 | 4.84 | ||||
| 6 | 3.00 | 5.49 | 5.72 |
| v | 2 B |
| v | 2 A |
③由表中数据在坐标纸上描点并作出a~F关系图线;
④对比实验结果与理论计算得到的关系图线(图3中已画出理论图线),造成上述偏差的原因是
第十部分 磁场
第一讲 基本知识介绍
《磁场》部分在奥赛考刚中的考点很少,和高考要求的区别不是很大,只是在两处有深化:a、电流的磁场引进定量计算;b、对带电粒子在复合场中的运动进行了更深入的分析。
一、磁场与安培力
1、磁场
a、永磁体、电流磁场→磁现象的电本质
b、磁感强度、磁通量
c、稳恒电流的磁场
*毕奥-萨伐尔定律(Biot-Savart law):对于电流强度为I 、长度为dI的导体元段,在距离为r的点激发的“元磁感应强度”为dB 。矢量式d![]() = k
= k![]() ,(d
,(d![]() 表示导体元段的方向沿电流的方向、
表示导体元段的方向沿电流的方向、![]() 为导体元段到考查点的方向矢量);或用大小关系式dB = k
为导体元段到考查点的方向矢量);或用大小关系式dB = k![]() 结合安培定则寻求方向亦可。其中 k = 1.0×10?7N/A2 。应用毕萨定律再结合矢量叠加原理,可以求解任何形状导线在任何位置激发的磁感强度。
结合安培定则寻求方向亦可。其中 k = 1.0×10?7N/A2 。应用毕萨定律再结合矢量叠加原理,可以求解任何形状导线在任何位置激发的磁感强度。
毕萨定律应用在“无限长”直导线的结论:B = 2k![]() ;
;
*毕萨定律应用在环形电流垂直中心轴线上的结论:B = 2πkI![]() ;
;
*毕萨定律应用在“无限长”螺线管内部的结论:B = 2πknI 。其中n为单位长度螺线管的匝数。
2、安培力
a、对直导体,矢量式为 ![]() = I
= I![]() ;或表达为大小关系式 F = BILsinθ再结合“左手定则”解决方向问题(θ为B与L的夹角)。
;或表达为大小关系式 F = BILsinθ再结合“左手定则”解决方向问题(θ为B与L的夹角)。
b、弯曲导体的安培力
⑴整体合力
折线导体所受安培力的合力等于连接始末端连线导体(电流不变)的的安培力。
证明:参照图9-1,令MN段导体的安培力F1与NO段导体的安培力F2的合力为F,则F的大小为
F = ![]()
= BI![]()
= BI![]()
关于F的方向,由于ΔFF2P∽ΔMNO,可以证明图9-1中的两个灰色三角形相似,这也就证明了F是垂直MO的,再由于ΔPMO是等腰三角形(这个证明很容易),故F在MO上的垂足就是MO的中点了。
证毕。
由于连续弯曲的导体可以看成是无穷多元段直线导体的折合,所以,关于折线导体整体合力的结论也适用于弯曲导体。(说明:这个结论只适用于匀强磁场。)
⑵导体的内张力
弯曲导体在平衡或加速的情形下,均会出现内张力,具体分析时,可将导体在被考查点切断,再将被切断的某一部分隔离,列平衡方程或动力学方程求解。
c、匀强磁场对线圈的转矩
如图9-2所示,当一个矩形线圈(线圈面积为S、通以恒定电流I)放入匀强磁场中,且磁场B的方向平行线圈平面时,线圈受安培力将转动(并自动选择垂直B的中心轴OO′,因为质心无加速度),此瞬时的力矩为
M = BIS
几种情形的讨论——
⑴增加匝数至N ,则 M = NBIS ;
⑵转轴平移,结论不变(证明从略);
⑶线圈形状改变,结论不变(证明从略);

*⑷磁场平行线圈平面相对原磁场方向旋转α角,则M = BIScosα ,如图9-3;
证明:当α = 90°时,显然M = 0 ,而磁场是可以分解的,只有垂直转轴的的分量Bcosα才能产生力矩…
⑸磁场B垂直OO′轴相对线圈平面旋转β角,则M = BIScosβ ,如图9-4。
证明:当β = 90°时,显然M = 0 ,而磁场是可以分解的,只有平行线圈平面的的分量Bcosβ才能产生力矩…
说明:在默认的情况下,讨论线圈的转矩时,认为线圈的转轴垂直磁场。如果没有人为设定,而是让安培力自行选定转轴,这时的力矩称为力偶矩。
二、洛仑兹力
1、概念与规律
a、![]() = q
= q![]() ,或展开为f = qvBsinθ再结合左、右手定则确定方向(其中θ为
,或展开为f = qvBsinθ再结合左、右手定则确定方向(其中θ为![]() 与
与![]() 的夹角)。安培力是大量带电粒子所受洛仑兹力的宏观体现。
的夹角)。安培力是大量带电粒子所受洛仑兹力的宏观体现。
b、能量性质
由于![]() 总垂直
总垂直![]() 与
与![]() 确定的平面,故
确定的平面,故![]() 总垂直
总垂直![]() ,只能起到改变速度方向的作用。结论:洛仑兹力可对带电粒子形成冲量,却不可能做功。或:洛仑兹力可使带电粒子的动量发生改变却不能使其动能发生改变。
,只能起到改变速度方向的作用。结论:洛仑兹力可对带电粒子形成冲量,却不可能做功。或:洛仑兹力可使带电粒子的动量发生改变却不能使其动能发生改变。
问题:安培力可以做功,为什么洛仑兹力不能做功?
解说:应该注意“安培力是大量带电粒子所受洛仑兹力的宏观体现”这句话的确切含义——“宏观体现”和“完全相等”是有区别的。我们可以分两种情形看这个问题:(1)导体静止时,所有粒子的洛仑兹力的合力等于安培力(这个证明从略);(2)导体运动时,粒子参与的是沿导体棒的运动v1和导体运动v2的合运动,其合速度为v ,这时的洛仑兹力f垂直v而安培力垂直导体棒,它们是不可能相等的,只能说安培力是洛仑兹力的分力f1 = qv1B的合力(见图9-5)。

很显然,f1的合力(安培力)做正功,而f不做功(或者说f1的正功和f2的负功的代数和为零)。(事实上,由于电子定向移动速率v1在10?5m/s数量级,而v2一般都在10?2m/s数量级以上,致使f1只是f的一个极小分量。)
☆如果从能量的角度看这个问题,当导体棒放在光滑的导轨上时(参看图9-6),导体棒必获得动能,这个动能是怎么转化来的呢?
若先将导体棒卡住,回路中形成稳恒的电流,电流的功转化为回路的焦耳热。而将导体棒释放后,导体棒受安培力加速,将形成感应电动势(反电动势)。动力学分析可知,导体棒的最后稳定状态是匀速运动(感应电动势等于电源电动势,回路电流为零)。由于达到稳定速度前的回路电流是逐渐减小的,故在相同时间内发的焦耳热将比导体棒被卡住时少。所以,导体棒动能的增加是以回路焦耳热的减少为代价的。
2、仅受洛仑兹力的带电粒子运动
a、![]() ⊥
⊥![]() 时,匀速圆周运动,半径r =
时,匀速圆周运动,半径r = ![]() ,周期T =
,周期T = ![]()
b、![]() 与
与![]() 成一般夹角θ时,做等螺距螺旋运动,半径r =
成一般夹角θ时,做等螺距螺旋运动,半径r = ![]() ,螺距d =
,螺距d = ![]()
这个结论的证明一般是将![]() 分解…(过程从略)。
分解…(过程从略)。
☆但也有一个问题,如果将![]() 分解(成垂直速度分量B2和平行速度分量B1 ,如图9-7所示),粒子的运动情形似乎就不一样了——在垂直B2的平面内做圆周运动?
分解(成垂直速度分量B2和平行速度分量B1 ,如图9-7所示),粒子的运动情形似乎就不一样了——在垂直B2的平面内做圆周运动?
其实,在图9-7中,B1平行v只是一种暂时的现象,一旦受B2的洛仑兹力作用,v改变方向后就不再平行B1了。当B1施加了洛仑兹力后,粒子的“圆周运动”就无法达成了。(而在分解v的处理中,这种局面是不会出现的。)
3、磁聚焦
a、结构:见图9-8,K和G分别为阴极和控制极,A为阳极加共轴限制膜片,螺线管提供匀强磁场。
b、原理:由于控制极和共轴膜片的存在,电子进磁场的发散角极小,即速度和磁场的夹角θ极小,各粒子做螺旋运动时可以认为螺距彼此相等(半径可以不等),故所有粒子会“聚焦”在荧光屏上的P点。
4、回旋加速器
a、结构&原理(注意加速时间应忽略)
b、磁场与交变电场频率的关系
因回旋周期T和交变电场周期T′必相等,故 ![]() =
=![]()
c、最大速度 vmax = ![]() = 2πRf
= 2πRf
5、质谱仪
速度选择器&粒子圆周运动,和高考要求相同。
第二讲 典型例题解析
一、磁场与安培力的计算
【例题1】两根无限长的平行直导线a、b相距40cm,通过电流的大小都是3.0A,方向相反。试求位于两根导线之间且在两导线所在平面内的、与a导线相距10cm的P点的磁感强度。
【解说】这是一个关于毕萨定律的简单应用。解题过程从略。
【答案】大小为8.0×10?6T ,方向在图9-9中垂直纸面向外。
【例题2】半径为R ,通有电流I的圆形线圈,放在磁感强度大小为B 、方向垂直线圈平面的匀强磁场中,求由于安培力而引起的线圈内张力。
【解说】本题有两种解法。
方法一:隔离一小段弧,对应圆心角θ ,则弧长L = θR 。因为θ →
查看习题详情和答案>>①为消除摩擦力的影响,实验前平衡摩擦力的具体操作为:取下______,把木板不带滑轮的一端适当垫高并反复调节,直到轻推小车后,小车能沿木板做______运动.
②某次实验测得的数据如下表所示,根据这些数据在坐标图中描点并作出a-
 图线,从a-
图线,从a- 图线求得合外力大小为______N(计算结果保留两位有效数字).
图线求得合外力大小为______N(计算结果保留两位有效数字).
Ⅱ.某物理兴趣小组的同学想用如图甲所示的电路探究一种热敏电阻的温度特性.
(1)请按电路原理图将图乙中所缺的导线补接完整.为了保证实验的安全,滑动变阻器的滑动触头P在实验开始前应置于______端(选填“a”或“b”)

(2)正确连接电路后,在保温容器中注入适量冷水.接通电源,调节R记下电压表和电流表的示数,计算出该温度下的电阻值,将它与此时的水温一起记入表中.改变水的温度,测量出不同温度下的电阻值.该组同学的测量数据如下表所示,请你在图丙的坐标纸中画出该热敏电阻的R-t关系图.对比实验结果与理论曲线(图中已画出)可以看出二者有一定的差异.除了读数等偶然误差外,还可能是什么原因造成?______.
| 温度/℃ | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| 阻值/kΩ | 7.8 | 5.3 | 3.4 | 2.2 | 1.5 | 1.1 | 0.9 | 0.7 |
①该电阻的温度大约稳定在______℃; ②此时电阻的发热功率为______W.
查看习题详情和答案>>
①为消除摩擦力的影响,实验前平衡摩擦力的具体操作为:取下
②某次实验测得的数据如下表所示,根据这些数据在坐标图中描点并作出a-
| 1 |
| m |
| 1 |
| m |

Ⅱ.某物理兴趣小组的同学想用如图甲所示的电路探究一种热敏电阻的温度特性.
(1)请按电路原理图将图乙中所缺的导线补接完整.为了保证实验的安全,滑动变阻器的滑动触头P在实验开始前应置于

(2)正确连接电路后,在保温容器中注入适量冷水.接通电源,调节R记下电压表和电流表的示数,计算出该温度下的电阻值,将它与此时的水温一起记入表中.改变水的温度,测量出不同温度下的电阻值.该组同学的测量数据如下表所示,请你在图丙的坐标纸中画出该热敏电阻的R-t关系图.对比实验结果与理论曲线(图中已画出)可以看出二者有一定的差异.除了读数等偶然误差外,还可能是什么原因造成?
| 温度/℃ | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| 阻值/kΩ | 7.8 | 5.3 | 3.4 | 2.2 | 1.5 | 1.1 | 0.9 | 0.7 |
①该电阻的温度大约稳定在
(7分)风力发电是目前可再生能源中技术比较成熟,具有规模化开发条件和商业发展前景的发电技术。小型独立风力发电系统一般不并网发电,只能独立使用,单台装机容量通常不超过10KW。它的构成为:风力发电机+充电器+数字逆变器。风力发电机由机头、转体、尾翼、叶片组成。叶片用来接受风力并通过机头转为电能;尾翼使叶片始终对着来风的方向从而获得最大的风能;转体能使机头灵活地转动以实现尾翼调整方向的功能;机头的转子是永磁体,定子是绕组切割磁感线产生电能。因风量不稳定,故小型风力发电机输出的是13-25V变化的交流电,须经充电器整流再对蓄电池充电,使风力发电机的产生的电能变能化学能。最后经逆变处理后供给用户使用。某学习小组对一小型风力发电机进行测定风速实验:将一铜棒与风力发电系统的输出端构成回路(注:风力发电机与铜棒直接相连,连接导线末画出)如图所示。铜棒ab长为0.5m,质量0.2Kg,两端用轻铜线相连。整个装置处在竖直向上的匀强磁场中,磁感应强度B=2T. 当有风速4m/s吹向风叶,铜棒与竖直方向成37°角且偏向纸内的位置时,铜棒处于受力平衡状态。
(1)此时铜棒中通过的电流大小与方向。
(2)如风力发电机能把风能的30%转化为发电机的机械能,发电系统的效率为50%(其他能量损失一概不计),已知此小型风力发电系统输出电压恒定为24V,问当铜棒与竖直方向成53°角平衡时风速为多少m/s?(g取10m/s2,ρ空气=1.29Kg/m3,sin370=0.6,cos370=0.8 )

查看习题详情和答案>>