网址:http://m.1010jiajiao.com/timu_id_486792[举报]
一、选择题(本题共10小题,每题4分,共40分)
1.解析:当θ较小时物块与木板间的摩擦力为静摩擦力,摩擦力大小与物块重力沿板方向的分力大小相等,其大小为:%20各种性质的力和物体的平衡.files/image170.gif) ,按正弦规律变化;当θ较大时物块与木板间的摩擦力为滑动摩擦力,摩擦力大小为:
,按正弦规律变化;当θ较大时物块与木板间的摩擦力为滑动摩擦力,摩擦力大小为:%20各种性质的力和物体的平衡.files/image172.gif) ,按余弦规律变化,故选B.答案:B
,按余弦规律变化,故选B.答案:B
2.解析:物体缓慢下降过程中,细绳与竖直方向的夹角θ不断减小,可把这种状态推到无限小,即细绳与竖直方向的夹角为零;由平衡条件可知%20各种性质的力和物体的平衡.files/image174.gif) 时,
时,%20各种性质的力和物体的平衡.files/image176.gif) ,
,%20各种性质的力和物体的平衡.files/image178.gif) ,所以物体缓慢下降过程中,F逐渐减小,Ff逐渐减小。故选D。
,所以物体缓慢下降过程中,F逐渐减小,Ff逐渐减小。故选D。
3. %20各种性质的力和物体的平衡.files/image179.gif) 解析: 由于二者间的电场力是作用力与反用力,若以
解析: 由于二者间的电场力是作用力与反用力,若以
B为研究对象,绝缘手柄对B球的作用力未知,陷入困境,
因此以A为研究对象。设A带电量为q,B带电量为Q,
AB间距离为a,OB间距离为h ,由库仑定律得
%20各种性质的力和物体的平衡.files/image181.gif) ,由三角形OAB得
,由三角形OAB得%20各种性质的力和物体的平衡.files/image183.gif) ,以B球为研究对象,
,以B球为研究对象,
受力如图3所示,由平衡条件得%20各种性质的力和物体的平衡.files/image185.gif) ,由以上三式
,由以上三式
得%20各种性质的力和物体的平衡.files/image187.gif) ,
,
所以%20各种性质的力和物体的平衡.files/image189.gif) ,故正确选项为D。
,故正确选项为D。
4.%20各种性质的力和物体的平衡.files/image190.gif) 解析:设两三角形滑块的质量均为m,对整体有:
解析:设两三角形滑块的质量均为m,对整体有:%20各种性质的力和物体的平衡.files/image192.gif)
滑块B受力如图所示,则对B有:%20各种性质的力和物体的平衡.files/image194.gif) ,
,%20各种性质的力和物体的平衡.files/image196.gif)
可解得: %20各种性质的力和物体的平衡.files/image135.gif)
5.解析:在增加重力时,不知哪根绳子先断.故我们选择O点为研究对象,先假设OA不会被拉断,OB绳上的拉力先达最大值,则:%20各种性质的力和物体的平衡.files/image199.gif) ,由拉密定理得:
,由拉密定理得:
%20各种性质的力和物体的平衡.files/image201.gif)
解得:%20各种性质的力和物体的平衡.files/image203.gif) ,OA将被拉断.前面假设不成立.
,OA将被拉断.前面假设不成立.
再假设OA绳子拉力先达最大值,%20各种性质的力和物体的平衡.files/image205.gif) ,此时,由拉密定理得:
,此时,由拉密定理得:
%20各种性质的力和物体的平衡.files/image207.gif)
解得:%20各种性质的力和物体的平衡.files/image209.gif) ,故OB将不会断.
,故OB将不会断.
此时,%20各种性质的力和物体的平衡.files/image211.gif) ,故悬挂重物的重力最多只能为
,故悬挂重物的重力最多只能为%20各种性质的力和物体的平衡.files/image139.gif) ,所以C正确,答案C。
,所以C正确,答案C。
6.解析:物体受力平衡时,无论如何建立直角坐标系,两个方向上的合力均为零。若以OA和垂直于OA方向建立坐标系,可以看出该力沿F1方向,A物体不能平衡;以水平和竖直方向建立坐标系,F4不能平衡。因此选BC,答案:BC
7.解析:由平衡知识可得,绳中拉力FT的大小不变,总等于物A的重力;假设汽车在滑轮的正下方,则绳中拉力FT的水平分量为零,此时汽车对地面的压力FN最小,汽车受到的水平向右的的摩擦力Ff为零;当汽车距滑轮下方为无穷远处时,绳中拉力FT的竖直分量为零,汽车对地面的压力FN最大,汽车受到的水平向右的的摩擦力Ff最大,故选B.答案:B
8.解析:本题“滤速器”即速度选择器,工作条件是电场力与洛仑兹力平衡,即qvB=qE,所以v=E/B。显然“滤速器”只滤“速”,与粒子电性无关,故可假设粒子电性为正,若a板电势较高,则电场力方向指向b板,洛仑兹力应指向a板方可满足条件,由左手定则可得选项A是正确的;若a板电势较低,同理可得选项D是正确的。答案:AD。
9.解析:若AB逆时针旋转,则A对皮带的静摩擦力向左、B对皮带的静摩擦力向右才能将上方皮带拉紧,因此皮带相对A轮有向右运动趋势,A为从动轮,B正确;同理,D项正确。答案:BD。
10.D解析:对物体受力分析,作出力的矢量三角形,就可解答。
二、填空和实验题
11.Mg 将第2、3块砖看成一个整体。由于对称性,第1、4块砖对2、3整体的摩擦力必定相同,且二者之和等于2、3整体的重力。所以第2与第1块砖的摩擦力大小为mg。
12.微粒在重力、电场力和洛仑兹力作用下处于平衡状态,受力分析如图,可知,
%20各种性质的力和物体的平衡.files/image213.jpg)
%20各种性质的力和物体的平衡.files/image215.gif)
%20各种性质的力和物体的平衡.files/image217.gif)
得电场强度%20各种性质的力和物体的平衡.files/image219.gif) ,磁感应强度
,磁感应强度%20各种性质的力和物体的平衡.files/image221.gif)
13.探究一个规律不应该只用特殊的来代替一般。所以本实验中两个分力的大小应不相等,所以橡皮条也就不在两绳夹角的平分线上,而两绳的长度可以不等。所以A、B不对。实验要求作用的效果要相同,因此O点的位置不能变动。因此D不对。实验中合力的大小应是量出来而不是算出来的,所以F不对。答案:C。
14.(1)因纸质量较小,两者间摩擦力也小,不易测量。纸贴在木板上,可增大正压力,从而增大滑动摩擦力,便于测量。
(2)①参考方案:只要将测力计的一端与木块A相连接,测力计的另一端与墙壁或竖直挡板之类的固定物相连.用手通过轻绳拉动木板B,读出并记下测力计的读数F,测出木块A的质量m.
②%20各种性质的力和物体的平衡.files/image223.gif)
③弹簧测力计
三、计算题
15.解:当水平拉力F=0时,轻绳处于竖直位置时,绳子张力最小T1=G
%20各种性质的力和物体的平衡.files/image224.jpg) 当水平拉力F=
当水平拉力F=%20各种性质的力和物体的平衡.files/image226.gif)
因此轻绳的张力范围是G≤≤%20各种性质的力和物体的平衡.files/image228.gif)
(2)设在某位置球处于平衡位置由平衡条件得%20各种性质的力和物体的平衡.files/image229.gif)
所以%20各种性质的力和物体的平衡.files/image231.gif) 即
即%20各种性质的力和物体的平衡.files/image233.gif) ,得图象如图所示。
,得图象如图所示。
16.解析:(1)当S接1时,棒刚好静止,则MN所受的安培力方向竖直向上,由左手定则可知,磁场的方向垂直纸面向里。
(2)设导轨的间距为L,MN棒的的质量为m。当S接1时,导体棒刚好静止,则
mg=%20各种性质的力和物体的平衡.files/image235.gif)
设最终稳定时MN的速率为v,则
BI’L=mg 而 %20各种性质的力和物体的平衡.files/image237.gif) 解得:
解得:%20各种性质的力和物体的平衡.files/image239.gif) m2/s
m2/s
%20各种性质的力和物体的平衡.files/image249.gif) 17.解析: 因为环2的半径为环3的2倍,环2的周长为环3的2倍,三环又是用同种金属丝制成的,所以环2的质量为环3的2倍。设m为环3的质量,那么三根绳承担的力为3mg,于是,环1与环3之间每根绳的张力FT1=mg。没有摩擦,绳的重量不计,故每根绳子沿其整个长度上的张力是相同的(如图所示)FT1= FT2=mg。
17.解析: 因为环2的半径为环3的2倍,环2的周长为环3的2倍,三环又是用同种金属丝制成的,所以环2的质量为环3的2倍。设m为环3的质量,那么三根绳承担的力为3mg,于是,环1与环3之间每根绳的张力FT1=mg。没有摩擦,绳的重量不计,故每根绳子沿其整个长度上的张力是相同的(如图所示)FT1= FT2=mg。
对环3,平衡时有:
由此%20各种性质的力和物体的平衡.files/image251.gif)
环2中心与环3中心之距离:%20各种性质的力和物体的平衡.files/image253.gif) ,
,
即%20各种性质的力和物体的平衡.files/image255.gif)
18.解析:热钢板靠滚子的摩擦力进入滚子之间,根据摩擦力和压力的关系,便可推知钢板的厚度
%20各种性质的力和物体的平衡.files/image256.gif) 以钢板和滚子接触的部分为研究对象,其受力情况如图所示,钢板能进入滚子之间,则在水平方向有:
以钢板和滚子接触的部分为研究对象,其受力情况如图所示,钢板能进入滚子之间,则在水平方向有:%20各种性质的力和物体的平衡.files/image258.gif) (式中
(式中%20各种性质的力和物体的平衡.files/image260.gif) ),所以由两式可得:μ≥tanθ
),所以由两式可得:μ≥tanθ
设滚子的半径为R,再由图中的几何关系可得
%20各种性质的力和物体的平衡.files/image262.gif) ,将此式代入得b≤(d+a)-
,将此式代入得b≤(d+a)- %20各种性质的力和物体的平衡.files/image264.gif) 代入数据得b≤
代入数据得b≤
即钢板在滚子间匀速移动时,钢板进入流子前厚度的最大值为
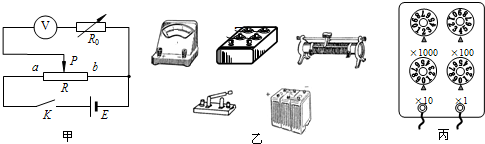
(1)试将如图乙所给实验仪器按实验电路连成测量电路.
(2)在测量时,可供选择的实验步骤有:
A.闭合开关K;
B.将电阻箱R0的阻值调到最大;
C.将电阻箱R0的阻值调到零;
D.调节电阻箱R0的阻值使电压表的指针指示1.5V,记下此时R0的值;
E.调节变阻器R的滑动片P,使电压表的指针指示3.0V;
F.把变阻器R的滑动片P滑到a端;
G.把变阻器R的滑动片P滑到b端;
H.断开开关K;
把必要的合理步骤选出来,按操作顺序将字母代号填在下面横线上
(3)若在步骤D中读出R0的阻值为如图丙所示位置,则电压表的电阻为
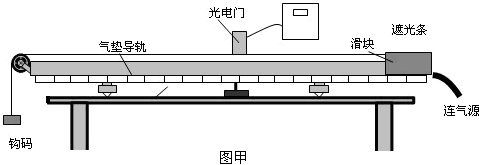
(1)实验前需要调整气垫导轨底座使之水平,利用现有器材如何判断导轨是否水平?
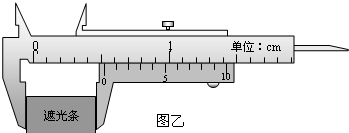
(2)如图乙所示,用游标卡尺测得遮光条的宽度d=
(3)本实验通过比较
| 1 |
| 2 |
| d |
| △t |
| ) | 2 |
| 1 |
| 2 |
| d |
| △t |
| ) | 2 |
Ⅱ.如图是“测电源的电动势和内阻”的实验电路,器材如下:待测电源(电动势约为1.5V,内阻较小)
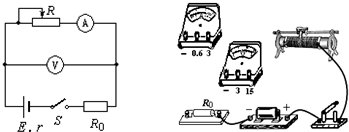
量程3V的理想电压表V
量程0.6A的电流表A(具有一定内阻)
定值电阻R0(R0=1.50Ω)
滑动变阻器R1(0-10Ω)
滑动变阻器R2(0-200Ω)
开关S、导线若干
①为方便实验调节且能较准确地进行测量,滑动变阻器应选用
| R | 1 |
| R | 1 |
②用笔画线代替导线在实物图中完成连线.
③实验中,改变滑动变阻器的阻值,测出当电流表读数为I1时,电压表读数为U1;当电流表读数为I2时,电压表读数为U2.则待测电源内阻的表达式r=
| ||||
|
| -R | 0 |
| ||||
|
| -R | 0 |

(1)根据打出的纸带(图2),选取纸带上打出的连续五个点A、B、C、D、E,测出A点距起点O的距离为xo,点A、C间的距离为x1,点C、E间的距离为x2,交流电的周期为T,当地重力加速度为g,则根据这些条件计算打C点时的速度表达式为:vc=
| ||||
| 4T |
| ||||
| 4T |
(2)根据实验原理,只要验证表达式
| x | 0 |
| +x | 1 |
| ||||||
3
|
| x | 0 |
| +x | 1 |
| ||||||
3
|
(3)完成实验中发现,重锤减少的重力势能总是大于重锤增加的动能,其原因主要是因为在重锤下落过程中存在着阻力的作用,我们可以通过该实验装置测定该阻力的大小则还需要测量的物理量是
Ⅱ.某研究性学习小组为了制作一种传感器,需要选用一电器元件.图1为该电器元件的伏安特性曲线,有同学对其提出质疑,先需进一步验证该伏安特性曲线,实验室备有下列器材:

| 器材(代号) | 规格 |
| 电流表(A1) 电流表(A2) 电压表(V1) 电压表(V2) 滑动变阻器(R1) 滑动变阻器(R2) 直流电源(E) 开关(S) 导线若干 |
量程0~50mA,内阻约为50Ω 量程0~200mA,内阻约为10Ω 量程0~3V,内阻约为10kΩ 量程0~15V,内阻约为25kΩ 阻值范围0~15Ω,允许最大电流1A 阻值范围0~1kΩ,允许最大电流100mA 输出电压6V,内阻不计 |
| A | 2 |
| A | 2 |
电压表应选用
| V | 1 |
| V | 1 |
| R | 1 |
| R | 1 |
②为达到上述目的,请在虚线框内(图2)画出正确的实验电路原理图3.
③实物连线(部分已连接好,完成余下部分)

Ⅱ.用一测力计水平拉一端固定的弹簧,用来测量弹簧的劲度系数k,测出的拉力F与弹簧长度L之间的数据关系如下表:
| 拉力F/N | 1.10 | 1.50 | 2.00 | 3.00 | 3.50 | 3.80 | 4.00 |
| 弹簧长度L、cm | 22.0 | 22.35 | 22.70 | 23.31 | 23.65 | 23.80 | 24.00 |
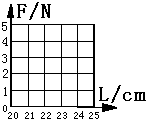
(2)图象与L轴的交点表示
(3)此弹簧的劲度系数为
 Ⅰ.某同学在做测定木块与木板间动摩擦因数的实验过程中,测滑动摩擦力时,他设计了两种实验方案.
Ⅰ.某同学在做测定木块与木板间动摩擦因数的实验过程中,测滑动摩擦力时,他设计了两种实验方案.方案一:木板固定在水平面上,用弹簧测力计水平拉动木块,如图甲所示.
方案二:用弹簧测力计水平地钩住木块,用力使木板在水平面上运动,如图乙所示.

除了实验必需的弹簧测力计、木块、木板、细线外,该同学还准备了若干重均为2.00N的砝码.
(1)上述两种方案中,你认为更合理的方案是
(2)该同学在木块上加砝码,改变木块对木板的压力,记录了5组实验数据,如下表所示.
| 实验次序 | 1 | 2 | 3 | 4 | 5 |
| 砝码个数 | 0 | 1 | 2 | 3 | 4 |
| 砝码对木块 的压力/N |
0 | 2.00 | 4.00 | 6.00 | 8.00 |
| 测力计示 数/N |
1.50 | 2.00 | 2.50 | 2.95 | 3.50 |
| 木块受到的 摩擦力/N |
1.50 | 2.00 | 2.50 | 2.95 | 3.50 |
Ⅱ.某实验小组利用如图甲所示的实验装置来验证钩码和滑块所组成的系统由静止释放后机械能是否守恒.实验前已经调整气垫导轨底座使之水平,且选定滑块从静止开始运动的过程进行测量.
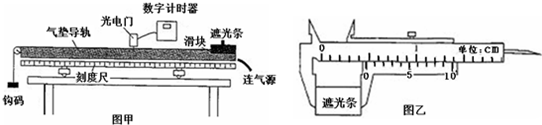
(1)如图乙所示,用游标卡尺测得窄遮光条的宽度d=
(2)已知当地重力加速度为g,钩码的质量为m,滑块的质量为M,在本实验中还需要直接测量的物理量有:
A.光电门到导轨左端定滑轮的距离x
B.滑块上的遮光条初始位置到光电门的距离s
C.气垫导轨的总长L
(3)本实验通过比较
| 1 |
| 2 |
| d |
| △t |
(4)为提高实验结果的准确程度,该实验小组的同学对此实验提出以下建议,其中确实对提高准确程度有作用的是
A.绳的质量要轻,滑轮的质量要轻
B.在“轻质绳”的前提下,绳越长越好
C.钩码的质量m越小越好
(5)你还有其他好的建议是