摘要:5.如图5.由物体A和B组成的系统处于静止状态.A.B的质量分别为mA和mB.且mA>mB.滑轮的质量和一切摩擦不计.使绳的悬点由P点向右移动一小段距离到Q点.系统再次达到静止状态.则悬点移动前后图中绳与水平方向的夹角θ将( ) 图5 A.变大 B.变小 C.不变 D.可能变大.也可能变小 解析:设绳中拉力为T.则当系统只要静止.则T=mBg.而对于A物体.2Tcos(90°-θ)=mAg.由于T不变.则θ不变.C正确. 答案:C 图6
网址:http://m.1010jiajiao.com/timu_id_3804675[举报]
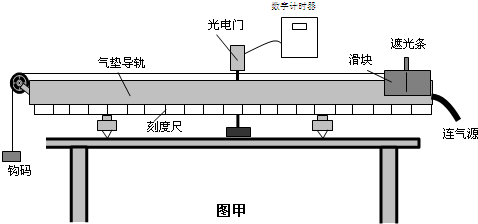
Ⅰ、某实验小组利用如图甲所示的实验装置来验证钩码和滑块所组成的系统机械能守恒.
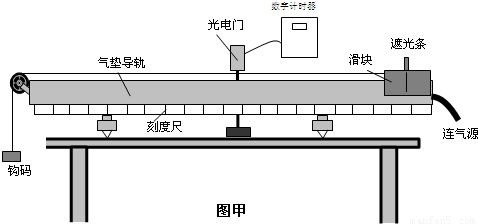
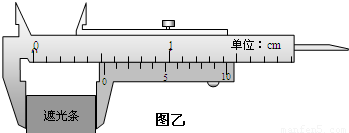
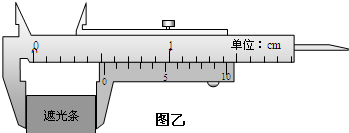
①如图乙所示,用游标卡尺测得遮光条的宽度d=______mm;实验时将滑块从图示位置由静止释放,由数字计时器读出遮光条通过光电门的时间△t=1.2×10-2s,则滑块经过光电门时的瞬时速度______m/s.在本次实验中还需要测量的物理量有:钩码的质量m、______和______(文字说明并用相应的字母表示).
②本实验通过比较______ 和______在实验误差允许的范围内相等(用测量的物理量符号表示),从而验证了系统的机械能守恒.
Ⅱ、李阳同学要帮妈妈制作一个自动控温孵化器,他到电子商城买了一只标称值为220Ω的半导体热敏电阻,由于不知道该电阻的温度特性,为此,他做了如下实验.
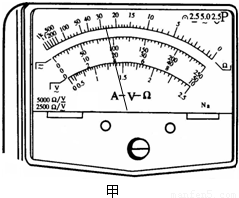
(1)在室温下(约20℃)他正确使用多用表的欧姆挡测该热敏电阻的阻值时,表的示数如图甲所示,可判定李阳同学测量时选用的是______挡,测得热敏电阻的阻值是______Ω.
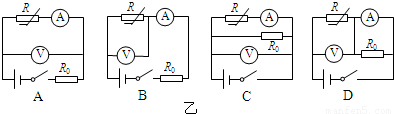
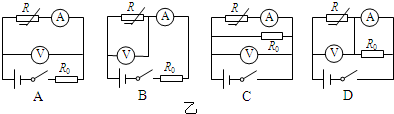
(2)李阳同学要通过改变热敏电阻的温度并用伏安法测热敏电阻的阻值来研究热敏电阻的温度特性,他准备了如下器材:
①蓄电池(电动势为6V,内阻不计)及电键
②伏特表(量程为0~6V,内阻很大)
③安培表(量程为0~20mA,内阻Rg=10Ω)
④定值电阻R(R=5Ω)
图乙中给出四个电路,其中合理的是______.
(3)李阳同学得到的实验数据如下表:
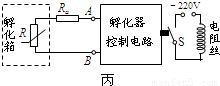
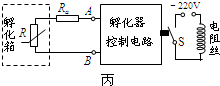
图丙是李阳同学利用这个热敏电阻制成的孵化器温度控制电路,其中控制电路的输入端A、B内接电路可等效为一个电动势为2.0V,内阻为100Ω的电源,当通过热敏电阻R的电流大于等于2.0mA时,控制电路动作,输出端的开关断开,加热器停止加热.孵化小鸡时,要求孵化箱恒温在39.5℃,为此,李阳将孵化箱的最高温度设定为40℃;为使恒温箱能在40℃时控制电路动作,定值电阻Ra的阻值应为______Ω.
 查看习题详情和答案>>
查看习题详情和答案>>
①如图乙所示,用游标卡尺测得遮光条的宽度d=______mm;实验时将滑块从图示位置由静止释放,由数字计时器读出遮光条通过光电门的时间△t=1.2×10-2s,则滑块经过光电门时的瞬时速度______m/s.在本次实验中还需要测量的物理量有:钩码的质量m、______和______(文字说明并用相应的字母表示).
②本实验通过比较______ 和______在实验误差允许的范围内相等(用测量的物理量符号表示),从而验证了系统的机械能守恒.
Ⅱ、李阳同学要帮妈妈制作一个自动控温孵化器,他到电子商城买了一只标称值为220Ω的半导体热敏电阻,由于不知道该电阻的温度特性,为此,他做了如下实验.
(1)在室温下(约20℃)他正确使用多用表的欧姆挡测该热敏电阻的阻值时,表的示数如图甲所示,可判定李阳同学测量时选用的是______挡,测得热敏电阻的阻值是______Ω.
(2)李阳同学要通过改变热敏电阻的温度并用伏安法测热敏电阻的阻值来研究热敏电阻的温度特性,他准备了如下器材:
①蓄电池(电动势为6V,内阻不计)及电键
②伏特表(量程为0~6V,内阻很大)
③安培表(量程为0~20mA,内阻Rg=10Ω)
④定值电阻R(R=5Ω)
图乙中给出四个电路,其中合理的是______.
(3)李阳同学得到的实验数据如下表:
| t/℃ | 15.0 | 20.0 | 25.0 | 30.0 | 35.0 | 40.0 | 45.0 | 50.0 |
| R/Ω | 330 | 275 | 230 | 202 | 170 | 144 | 120 | 103 |
查看习题详情和答案>>
(2011?南县模拟)Ⅰ、某实验小组利用如图甲所示的实验装置来验证钩码和滑块所组成的系统机械能守恒.
①如图乙所示,用游标卡尺测得遮光条的宽度d=
②本实验通过比较
(m+M)(
)2
(m+M)(
)2在实验误差允许的范围内相等(用测量的物理量符号表示),从而验证了系统的机械能守恒.
Ⅱ、李阳同学要帮妈妈制作一个自动控温孵化器,他到电子商城买了一只标称值为220Ω的半导体热敏电阻,由于不知道该电阻的温度特性,为此,他做了如下实验.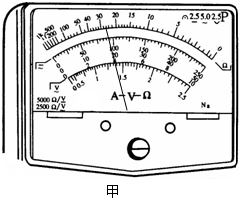
(1)在室温下(约20℃)他正确使用多用表的欧姆挡测该热敏电阻的阻值时,表的示数如图甲所示,可判定李阳同学测量时选用的是
(2)李阳同学要通过改变热敏电阻的温度并用伏安法测热敏电阻的阻值来研究热敏电阻的温度特性,他准备了如下器材:
①蓄电池(电动势为6V,内阻不计)及电键
②伏特表(量程为0~6V,内阻很大)
③安培表(量程为0~20mA,内阻Rg=10Ω)
④定值电阻R0(R0=5Ω)
图乙中给出四个电路,其中合理的是
(3)李阳同学得到的实验数据如下表:
图丙是李阳同学利用这个热敏电阻制成的孵化器温度控制电路,其中控制电路的输入端A、B内接电路可等效为一个电动势为2.0V,内阻为100Ω的电源,当通过热敏电阻R的电流大于等于2.0mA时,控制电路动作,输出端的开关断开,加热器停止加热.孵化小鸡时,要求孵化箱恒温在39.5℃,为此,李阳将孵化箱的最高温度设定为40℃;为使恒温箱能在40℃时控制电路动作,定值电阻Ra的阻值应为
查看习题详情和答案>>
①如图乙所示,用游标卡尺测得遮光条的宽度d=
5.2
5.2
mm;实验时将滑块从图示位置由静止释放,由数字计时器读出遮光条通过光电门的时间△t=1.2×10-2s,则滑块经过光电门时的瞬时速度0.43
0.43
m/s.在本次实验中还需要测量的物理量有:钩码的质量m、滑块上的遮光条初始位置到光电门的距离s
滑块上的遮光条初始位置到光电门的距离s
和滑块的质量M
滑块的质量M
(文字说明并用相应的字母表示).②本实验通过比较
mgs
mgs
和| 1 |
| 2 |
| d |
| △t |
| 1 |
| 2 |
| d |
| △t |
Ⅱ、李阳同学要帮妈妈制作一个自动控温孵化器,他到电子商城买了一只标称值为220Ω的半导体热敏电阻,由于不知道该电阻的温度特性,为此,他做了如下实验.
(1)在室温下(约20℃)他正确使用多用表的欧姆挡测该热敏电阻的阻值时,表的示数如图甲所示,可判定李阳同学测量时选用的是
×10
×10
挡,测得热敏电阻的阻值是260
260
Ω.(2)李阳同学要通过改变热敏电阻的温度并用伏安法测热敏电阻的阻值来研究热敏电阻的温度特性,他准备了如下器材:
①蓄电池(电动势为6V,内阻不计)及电键
②伏特表(量程为0~6V,内阻很大)
③安培表(量程为0~20mA,内阻Rg=10Ω)
④定值电阻R0(R0=5Ω)
图乙中给出四个电路,其中合理的是
D
D
.(3)李阳同学得到的实验数据如下表:
| t/℃ | 15.0 | 20.0 | 25.0 | 30.0 | 35.0 | 40.0 | 45.0 | 50.0 |
| R/Ω | 330 | 275 | 230 | 202 | 170 | 144 | 120 | 103 |
756
756
Ω.(1)如图所示,甲图中螺旋测微器的读数为

(2)如图乙所示,在探究“共点力合成”的实验中,橡皮条一端固定于P点,另一端连接两个弹簧秤,分别用F1与F2拉两个弹簧秤,将结点拉至O点.现让F2大小增大,方向不变,要使结点仍位于O点,则F1的大小及图中β(β>90°)角的变化可能是
A.增大F1的同时增大β角 B.减小F1的同时减小β角
C.增大F1的同时减小β角 D.减小F1的同时增大β角
(3)如图丙所示,是用DIS实验系统探究“物体的加速度与力和质量的关系”实验装置.
①为了使小车所受的合力等于绳子的拉力,在实验测量前,还需要对实验装置作必要的调整,请你写出该如何调整:
②保持小车所受拉力不变,改变小车的质量,测得了下表所示的6组数据:
请根据6组数据在上图中选择合适的坐标作出加速度与质量的关系图线.
③如果钩码的重力越来越大时,小车的加速度会无限制地增加吗?请简要回答理由和结论:
查看习题详情和答案>>
1.881
1.881
mm.(2)如图乙所示,在探究“共点力合成”的实验中,橡皮条一端固定于P点,另一端连接两个弹簧秤,分别用F1与F2拉两个弹簧秤,将结点拉至O点.现让F2大小增大,方向不变,要使结点仍位于O点,则F1的大小及图中β(β>90°)角的变化可能是
BC
BC
:A.增大F1的同时增大β角 B.减小F1的同时减小β角
C.增大F1的同时减小β角 D.减小F1的同时增大β角
(3)如图丙所示,是用DIS实验系统探究“物体的加速度与力和质量的关系”实验装置.
①为了使小车所受的合力等于绳子的拉力,在实验测量前,还需要对实验装置作必要的调整,请你写出该如何调整:
倾斜木板以平衡摩擦力
倾斜木板以平衡摩擦力
.②保持小车所受拉力不变,改变小车的质量,测得了下表所示的6组数据:
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 |
| m/kg | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 |
| a/m?s-2 | 0.95 | 0.72 | 0.61 | 0.49 | 0.40 | 0.35 |
③如果钩码的重力越来越大时,小车的加速度会无限制地增加吗?请简要回答理由和结论:
不会,对于钩码来说合外力小于重力,加速度小于重力加速度
不会,对于钩码来说合外力小于重力,加速度小于重力加速度
.2011年11月29日我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第9颗北斗导航卫星送入太空轨道.“北斗”卫星导航定位系统将由5颗静止轨道卫星(同步卫星)和30颗非静止轨道卫星组成(如下图所示),30颗非静止轨道卫星中有27颗是中轨道卫星,中轨道卫星平均分布在倾角55度的三个平面上,轨道高度约21500公里,静止轨道卫星的高度约为36000公里,地球半径约为6400公里.已知 ,下列关于北斗导航卫星的说法正确的是
,下列关于北斗导航卫星的说法正确的是
A.静止轨道卫星的向心加速度比中轨道卫星向心加速度大
B.静止轨道卫星和中轨卫星的线速度均大于地球的第一宇宙速度
C.中轨道卫星的周期约为12.7h
D.地球赤道上随地球自转物体的向心加速度比静止轨道卫星向心加速度小
查看习题详情和答案>>
2011年11月29日我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第9颗北斗导航卫星送入太空轨道.“北斗”卫星导航定位系统将由5颗静止轨道卫星(同步卫星)和30颗非静止轨道卫星组成(如下图所示),30颗非静止轨道卫星中有27颗是中轨道卫星,中轨道卫星平均分布在倾角55度的三个平面上,轨道高度约21500公里,静止轨道卫星的高度约为36000公里,地球半径约为6400公里.已知![]() ,下列关于北斗导航卫星的说法正确的是
,下列关于北斗导航卫星的说法正确的是
A.静止轨道卫星的向心加速度比中轨道卫星向心加速度大
B.静止轨道卫星和中轨卫星的线速度均大于地球的第一宇宙速度
C.中轨道卫星的周期约为12.7h
D.地球赤道上随地球自转物体的向心加速度比静止轨道卫星向心加速度小