摘要:[错解]根据f=μN.题目中μ≠0.要使f=0必有N=0.为此需要安培力FB与导体重力G平衡.由左手定则可判定图10-8中B项有此可能.故选B.[错解原因]上述分析受到题目中“动摩擦因数为μ 的干扰.误用滑动摩擦力的计算式f=μN来讨论静摩擦力的问题.从而导致错选.漏选.[分析解答]要使静摩擦力为零.如果N=0.必有f=0.图10-8B选项中安培力的方向竖直向上与重力的方向相反可能使N=0.B是正确的,如果N≠0.则导体除受静摩擦力f以外的其他力的合力只要为零.那么f=0.在图10-8A选项中.导体所受到的重力G.支持力N及安培力F安三力合力可能为零.则导体所受静摩擦力可能为零.图10-8的C.D选项中.从导体所受到的重力G.支持力N及安培力F安三力的方向分析.合力不可能为零.所以导体所受静摩擦力不可能为零.故正确的选项应为A.B.[评析]本题是一道概念性极强的题.又是一道力学与电学知识交叉的综合试题.摩擦力有静摩擦力与滑动摩擦力两种.判断它们区别的前提是两个相互接触的物体有没有相对运动.力学中的概念的准确与否影响电学的学习成绩.例5 有一自由的矩形导体线圈.通以电流I′.将其移入通以恒定电流I的长直导线的右侧.其ab与cd边跟长直导体AB在同一平面内且互相平行.如图10-9所示.试判断将该线圈从静止开始释放后的受力和运动情况.
网址:http://m.1010jiajiao.com/timu_id_203454[举报]
用伏安法测量一个定值电阻的电阻值,现有的器材规格如下:
A.待测电阻Rx(大约100Ω)
B.直流毫安表A1(量程0~10mA,内阻约为100Ω)
C.直流毫安表A2(量程0~40mA,内阻约为40Ω)
D.直流电压表V1(量程0~3V,内阻约为5kΩ)
E.直流电压表V2(量程0~15V,内阻约为15kΩ)
F.直流电源(输出电压4V,内阻计)
G.滑动变阻器R(阻值范围0~50Ω,允许最大电流1A)
H.开关一个、导线若干
【小题1】根据器材的规格和实验要求,为使实验结果更加准确,
直流毫安表应选 ,直流电压表应选 。(填序号A、B、C、D)
【小题2】在方框内画出实验电路图,要求电压和电流的变化范围尽可能大。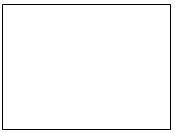
I某同学在研究平抛运动的实验中,在小方格纸上画出小球做平抛运动的轨迹后,又在轨迹上取出a、b、c、d四个点(轨迹已擦去),已知小方格纸的边长L=2.5cm,g取10m/s2,请你根据小方格纸上的信息,通过分析计算完成下面几个问题:
(1)小球从a→b,b→c,c→d所经历的时间是 s;
(2)小球平抛运动的初速度v0= m/s.
II(6分)一同学用如图2所示的装置做“探究加速度与力的关系”的实验:小车搁置在水平放置的长木板上,纸带连接车尾并穿过打点计时器,用来测定小车的加速度a,小桶通过细线对小车施拉力F.在保持小车质量不变的情况下,改变对小车拉力F的大小,测得小车所受拉力F和加速度a的数据如下表:
(1)根据测得的数据,在图中作出a-F图象.
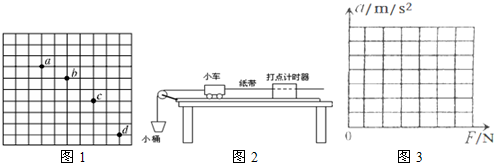
(2)由图象可知,小车与长木板之间的最大静摩擦力大小为 N.
(3)若要使作出的a-F图线过坐标原点,需要调整实验装置,可采取以下措施中的
A.增加小车的质量
B.减小小车的质量
C.适当垫高长木板的右端
D.适当增加小桶内砝码质量.
查看习题详情和答案>>
(1)小球从a→b,b→c,c→d所经历的时间是
(2)小球平抛运动的初速度v0=
II(6分)一同学用如图2所示的装置做“探究加速度与力的关系”的实验:小车搁置在水平放置的长木板上,纸带连接车尾并穿过打点计时器,用来测定小车的加速度a,小桶通过细线对小车施拉力F.在保持小车质量不变的情况下,改变对小车拉力F的大小,测得小车所受拉力F和加速度a的数据如下表:
| F/N | 0.21 | 0.30 | 0.40 | 0.49 | 0.60 |
| a(ms-2) | 0.10 | 0.21 | 0.29 | 0.41 | 0.49 |

(2)由图象可知,小车与长木板之间的最大静摩擦力大小为
(3)若要使作出的a-F图线过坐标原点,需要调整实验装置,可采取以下措施中的
A.增加小车的质量
B.减小小车的质量
C.适当垫高长木板的右端
D.适当增加小桶内砝码质量.
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连,正确连接所需电路
②将小车停在C点,然后释放小车,小车在细线拉动下运动,记录
A
A
A.细线拉力及小车通过A、B时的速度
B.钩码的质量和小车的质量
C、钩码的质量及小车通过A、B时的速度
D、小车的质量和细线的长度
③在小车中增加砝码,或减少砝码,重复②的操作.
(2)表1是他们测得的一组数据,其中M是M1与小车中砝码质量m之和,|v22-v21|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所作的功.表格中△E3=
0.600
0.600
,W3=0.610
0.610
.(结果保留三位有效数字)表1 数据记录表
| 次数 | M/kg | |v22-v21|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
(2009?广东)某试验小组利用拉力传感器和速度传感器探究“动能原理”.如图1,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平面上相距50.0cm的A、B两点各安装一个速度传感器,
记录小车通过A、B时的速度大小、小车中可以放置砝码.
(1)试验主要步骤如下:
①测量
②将小车停在C点,
③在小车中增加砝码,或
(2)表1是他们测得的一组数据,期中M是M1与小车中砝码质量之和,|
-
|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的△E3=
(3)根据表,请在图2中的方格纸上作出△E-W图线.

数据记录表
查看习题详情和答案>>
记录小车通过A、B时的速度大小、小车中可以放置砝码.
(1)试验主要步骤如下:
①测量
小车
小车
和拉力传感器的总质量M1;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;②将小车停在C点,
由静止开始释放小车
由静止开始释放小车
,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度;③在小车中增加砝码,或
改变小车质量
改变小车质量
,重复②的操作.(2)表1是他们测得的一组数据,期中M是M1与小车中砝码质量之和,|
| v | 2 2 |
| v | 2 1 |
0.600J
0.600J
,W3=0.610J
0.610J
.(结果保留三位有效数字)(3)根据表,请在图2中的方格纸上作出△E-W图线.

数据记录表
| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||||
| 2 | 0.500 | 1.65 | 0.413 | 0.8400 | 0.4200 | ||||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小;
可以通过在小车上放置砝码来改变小车的质量,通过加减钩码的数量来改变拉力的大小.

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连,正确地连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,记录
③改变小车的质量或改变所挂钩码的数量,重复②的操作.
(2)表格中是他们测得的一组数据,其中M是M1与小车中砝码质量之和,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表中的△E3=
(3)根据表格中的数据,请在图2所示方格纸上作出△E-W图线.
实验数据记录表格.
查看习题详情和答案>>
可以通过在小车上放置砝码来改变小车的质量,通过加减钩码的数量来改变拉力的大小.

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连,正确地连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,记录
细线拉力(或力传感器的示数)
细线拉力(或力传感器的示数)
及小车通过A、B时的速度;③改变小车的质量或改变所挂钩码的数量,重复②的操作.
(2)表格中是他们测得的一组数据,其中M是M1与小车中砝码质量之和,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表中的△E3=
0.600
0.600
J,W3=0.610
0.610
J(结果保留三位有效数字).(3)根据表格中的数据,请在图2所示方格纸上作出△E-W图线.
实验数据记录表格.
| 次数 | M/kg | |v12-v22|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |