摘要:总结结论 将每次实验的数据进行研究.得到这样的结论: 当物体与凸透镜的距离大于透镜的二倍焦距时.成倒立的放大的实像, 当物体与凸透镜的距离小于透镜的二倍焦距.但大于焦距时.成倒立的缩小的实像, 当物体与凸透镜的距离小于透镜的焦距时.成正立的放大的虚像, 进一步研究表明:焦点是成实像和虚像的分界点.另外.二倍焦距点是成放大实像和缩小实像的分界点. 通过计算机模拟实验我们不难发现如下规律: 当物体从较远处向透镜靠近时.物距在不断减小.像和像距都在逐渐变大, 当物体从较近处远离透镜时.物距在不断增大.像和像距都在逐渐减小.
网址:http://m.1010jiajiao.com/timu_id_2016513[举报]
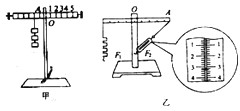 在“研究杠杆平衡条件”的实验中
在“研究杠杆平衡条件”的实验中(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向
左
左
边旋转,使杠杆在水平位置平衡(选填“左”或“右”).(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2 格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是
在右边3处挂2个钩码
在右边3处挂2个钩码
.(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是
为了寻找杠杆平衡的普遍规律
为了寻找杠杆平衡的普遍规律
.(4)如图乙所示是小明同学的实验示意图,弹簧测力计的示数F2=
3.2
3.2
N;小明在总结归纳结论时发现F1×OB与F2×OA不相等,你认为小明没有能得到正确结论的原因是F2的力臂测量错误
F2的力臂测量错误
.某小组同学在“研究光的折射规律”的实验中,按正确的方法安装和调节好实验装置.他们使光从空气斜射入水中,按表一中的入射角i依次进行了三次实验,并将相应的折射角r记录在表一中.然后他们使光从空气斜射入玻璃中,重复上述实验,并将数据记录在表二中.为了进一步探究入射角i和折射角r之间的关系,他们进行适量的运算,将结果分别记录在表一和表二的后四列中.
表一(空气斜射入水)
表二(空气斜射入玻璃)
(1)分析比较实验序号
(2)分析比较每一次实验数据中的入射角i与折射角r的大小关系及相关条件,可得出的初步结论是:
(3)分析比较实验序号1与4(或2与5、3与6)数据中的入射角i与折射角r的关系及相关条件,可得出的初步结论是:
查看习题详情和答案>>
表一(空气斜射入水)
| 实验 序号 |
入射角i(度) | 折射角r(度) | 入射角的正弦sini(×10-2) | 折射角的正弦sinr(×10-2) | 入射角的余弦cosi(×10-2) | 折射角的余弦cosr(×10-2) |
| 1 | 23.0 | 17.5 | 39 | 30 | 92 | 95 |
| 2 | 36.0 | 26.7 | 59 | 45 | 81 | 89 |
| 3 | 51.0 | 36.9 | 78 | 60 | 63 | 80 |
| 实验 序号 |
入射角i(度) | 折射角r(度) | 入射角的正弦sini(×10-2) | 折射角的正弦sinr(×10-2) | 入射角的余弦cosi(×10-2) | 折射角的余弦cosr(×10-2) |
| 4 | 23.0 | 15.0 | 39 | 26 | 92 | 97 |
| 5 | 36.0 | 23.0 | 59 | 39 | 81 | 92 |
| 6 | 51.0 | 31.3 | 78 | 52 | 63 | 85 |
1、2、3(或4、5、6)
1、2、3(或4、5、6)
数据中的入射角i与折射角r变化关系及相关条件,可得出的初步结论是:光从空气斜射入其它介质,折射角随入射角的增大而增大.(2)分析比较每一次实验数据中的入射角i与折射角r的大小关系及相关条件,可得出的初步结论是:
光从空气斜射入其它介质,折射角小于入射角
光从空气斜射入其它介质,折射角小于入射角
.(3)分析比较实验序号1与4(或2与5、3与6)数据中的入射角i与折射角r的关系及相关条件,可得出的初步结论是:
光从空气斜射入水、玻璃中,当入射角一定时,在玻璃中的折射角总是小于水中的折射角
光从空气斜射入水、玻璃中,当入射角一定时,在玻璃中的折射角总是小于水中的折射角
.在“探究并联电路的特点”实验中,某小组同学用电源、电键、若干已知阻值的电阻、几个电压表和电流表、若干根导线进行实验.先通过实验得到“并联电路各支路两端电压相等”的规律,然后按图1(a)所示的电路图连接电路继续实验.试接触后,发现表A的表盘如图1(b)所示,发生这一现象的原因是 .修正后,重新进行实验,并将实验数据记录在下表中.
电源电压为6伏
(1)分析比较实验序号 中干路中电流与支路1、支路2中电流的数量关系,可得出的初步结论是:在并联电路中,干路电流等于各支路电流之和.
(2)分析比较实验序号1、2与3中的支路1、支路2电阻阻值及相关条件,可得出的初步结论是:当支路2中的电阻一定时,并联电路的总电阻随着 .
(3)为了研究并联电路总电阻和各电阻的关系,该组同学又利用原来的电源(电压仍为6伏)连接了如图2所示的电路,并用电阻R总替换上述实验中的R1和R2.则在实验序号2中应采用阻值为 欧的电阻作为R总;每次实验时,眼睛主要应该观察电路中的电流表示数,使它与原来并联电路 的示数相同.
(4)进一步分析比较表中的支路1电流I1和电阻R1的乘积与支路2电流I2和电阻R2的乘积的关系,可得到的结论是: .

查看习题详情和答案>>
电源电压为6伏
| 实验序号 | 支路1 | 支路2 | 干路电流 | ||
| 电阻(欧) | 电流(安) | 电阻(欧) | 电流(安) | ||
| 1 | 5 | 1.2 | 10 | 0.6 | 1.8 |
| 2 | 15 | 0.4 | 10 | 0.6 | 1.0 |
| 3 | 20 | 0.3 | 10 | 0.6 | 0.9 |
(2)分析比较实验序号1、2与3中的支路1、支路2电阻阻值及相关条件,可得出的初步结论是:当支路2中的电阻一定时,并联电路的总电阻随着
(3)为了研究并联电路总电阻和各电阻的关系,该组同学又利用原来的电源(电压仍为6伏)连接了如图2所示的电路,并用电阻R总替换上述实验中的R1和R2.则在实验序号2中应采用阻值为
(4)进一步分析比较表中的支路1电流I1和电阻R1的乘积与支路2电流I2和电阻R2的乘积的关系,可得到的结论是:
在“研究杠杆平衡条件”的实验中
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向______边旋转,使杠杆在水平位置平衡(选填“左”或“右”).
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2 格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是______.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是______.
(4)如图乙所示是小明同学的实验示意图,弹簧测力计的示数F2=______N;小明在总结归纳结论时发现F1×OB与F2×OA不相等,你认为小明没有能得到正确结论的原因是______.
查看习题详情和答案>>
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向______边旋转,使杠杆在水平位置平衡(选填“左”或“右”).
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2 格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是______.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是______.
(4)如图乙所示是小明同学的实验示意图,弹簧测力计的示数F2=______N;小明在总结归纳结论时发现F1×OB与F2×OA不相等,你认为小明没有能得到正确结论的原因是______.
在“研究杠杆平衡条件”的实验中
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向______边旋转,使杠杆在水平位置平衡(选填“左”或“右”).
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2 格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是______.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是______.
(4)如图乙所示是小明同学的实验示意图,弹簧测力计的示数F2=______N;小明在总结归纳结论时发现F1×OB与F2×OA不相等,你认为小明没有能得到正确结论的原因是______.
 查看习题详情和答案>>
查看习题详情和答案>>
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向______边旋转,使杠杆在水平位置平衡(选填“左”或“右”).
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2 格的A处挂了3个钩码,如图甲所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是______.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是______.
(4)如图乙所示是小明同学的实验示意图,弹簧测力计的示数F2=______N;小明在总结归纳结论时发现F1×OB与F2×OA不相等,你认为小明没有能得到正确结论的原因是______.
查看习题详情和答案>>