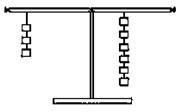
摘要:在验证杠杆平衡条件时.某实验小组得到了如图9-15所示的杠杆平衡状态.已知每个钩码的质量均相等: (1)若钩码所挂位置不动.将左边的钩码去掉一个.为使杠杆仍然保持平衡.右边的钩码该拿掉 个, (2)由此.总结出杠杆的平衡条件为: .
网址:http://m.1010jiajiao.com/timu3_id_1338276[举报]
 在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等:
在验证杠杆平衡条件时,某实验小组得到了如图所示的杠杆平衡状态.已知每个钩码的质量均相等:(1)实验前应调节
平衡螺母
平衡螺母
,使杠杆在
水平
水平
位置平衡,这样做的目的是
便于测量力臂
便于测量力臂
.实验过程中,为了使杠杆保持平衡,不可以
不可以
(填“可以”或“不可以”)再使用上述调节的元件.(2)若钩码所挂位置不动,将左边的钩码去掉一个,为使杠杆仍然保持平衡,右边的钩码该拿掉
2
2
个.(3)由此,总结出杠杆的平衡条件为:
动力×动力臂=阻力×阻力臂或者F1L1=F2L2或者
=
| F1 |
| F2 |
| L2 |
| L1 |
动力×动力臂=阻力×阻力臂或者F1L1=F2L2或者
=
.| F1 |
| F2 |
| L2 |
| L1 |
(4)若两端钩码分别向内移动相同的距离,则杠杆
左
左
(填“左”或“右”)端下沉.(2010?溧水县二模)图1为探究“杠杆的平衡条件”的实验装置.实验中:
(1)首先应调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为
(2)在验证杠杆平衡条件时,某实验小组得到了图1所示的杠杆平衡状态.已知每个钩码的质量均相等.若钩码所挂位置不动,将左边的钩码去掉一个,为使杠杆仍然保持平衡,右边的钩码该拿掉
(3)利用“杠杆的平衡条件”这个理论判断,图2所示的机械在使用时属于费力杠杆的是

查看习题详情和答案>>
(1)首先应调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为
0
0
.(2)在验证杠杆平衡条件时,某实验小组得到了图1所示的杠杆平衡状态.已知每个钩码的质量均相等.若钩码所挂位置不动,将左边的钩码去掉一个,为使杠杆仍然保持平衡,右边的钩码该拿掉
2
2
个.(3)利用“杠杆的平衡条件”这个理论判断,图2所示的机械在使用时属于费力杠杆的是
②
②
(填序号).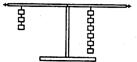 在验证杠杆平衡条件时,某实验小组得到了如右图所示的杠杆平衡状态,已知每个钩码的质量均相等:
在验证杠杆平衡条件时,某实验小组得到了如右图所示的杠杆平衡状态,已知每个钩码的质量均相等:(1)已知钩码所挂位置不动,将左边的钩码拿掉一个,为使杠杆仍然保持平衡,右边的钩码拿掉
2
2
个;(2)由此,总结出杠杆的平衡条件为
F1L1=F2L2
F1L1=F2L2
.