摘要:例3. 如图1所示.a.b是能自由移动的物体.c.d是容器自身凸起的一部分.现往容器里注入一些水.则下列说法错误的是( ) A. a物体一定受浮力作用 B. b物体一定受浮力作用 C. c部分一定受浮力作用 D. d部分一定受浮力作用 图1 解析:本题主要考查学生对于浮力产生原因的理解.以及据此分析运用知识的能力.这里我们要紧紧抓住浮力产生的原因--物体受到液体对其上下表面压力差.因此a.d必受浮力.而b的上表面没有水.可以认为其所受向下压力为零.但其下表面仍受向上压力.故压力差存在且向上.即b也受浮力.对于c而言.它的下表面没有水.故没有受到向上的压力.因此没有向上的压力差.故不受浮力.这里千万不要认为d为容器一部分就不受浮力.只要它有向上的压力差.就一定要受浮力.故选C.
网址:http://m.1010jiajiao.com/timu3_id_1312651[举报]
如图所示,是小松同学测定滑轮组机械效率的装置图.
(1)小松同学在实验中测量的有关数据如下表,请你根据表中数据画出实验中滑轮组的绕线,并填好下表的空格:
| 次数 | 钩码重 G/N | 钩码上升 的高度h/m | 拉力F/N | 细线自由端 移动的距离s/m | 机械效率 /% /% |
| 1 | 1.0 | 0.2 | 0.8 | 0.4 | 62.5 |
| 2 | 3.0 | 0.3 | 2.0 | 0.6 | 75 |
(3)请根据实验结论及相关知识判断,下列说法正确的是( )
A、滑轮组的机械效率大小只取决于摩擦及动滑轮的重力,与被提物重无关
B、 对同一滑轮组,所提物体重力越小,机械效率越高
C、 在不计绳重及摩擦时,机械效率的大小与绳子的绕法无关
D、 滑轮组的机械效率越高,所做的有用功就多 查看习题详情和答案>>
如图所示,是小松同学测定滑轮组机械效率的装置图.

(1)小松同学在实验中测量的有关数据如下表,请你根据表中数据画出实验中滑轮组的绕线,并填好下表的空格:
(2)小松在实验过程中,应当 拉动弹簧测力计,才能通过弹簧测力计准确读出拉力的大小。
(3)请根据实验结论及相关知识判断,下列说法正确的是( )
A、滑轮组的机械效率大小只取决于摩擦及动滑轮的重力,与被提物重无关
B、 对同一滑轮组,所提物体重力越小,机械效率越高
C、 在不计绳重及摩擦时,机械效率的大小与绳子的绕法无关
D、 滑轮组的机械效率越高,所做的有用功就多
(1)小松同学在实验中测量的有关数据如下表,请你根据表中数据画出实验中滑轮组的绕线,并填好下表的空格:
| 次数 | 钩码重 G/N | 钩码上升 的高度h/m | 拉力F/N | 细线自由端 移动的距离s/m | 机械效率 /% /% |
| 1 | 1.0 | 0.2 | 0.8 | 0.4 | 62.5 |
| 2 | 3.0 | 0.3 | 2.0 | 0.6 | 75 |
(3)请根据实验结论及相关知识判断,下列说法正确的是( )
A、滑轮组的机械效率大小只取决于摩擦及动滑轮的重力,与被提物重无关
B、 对同一滑轮组,所提物体重力越小,机械效率越高
C、 在不计绳重及摩擦时,机械效率的大小与绳子的绕法无关
D、 滑轮组的机械效率越高,所做的有用功就多
阅读下面的短文,回答问题。
传 感 器
传感器是能感受规定的被测量并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成。传感器能满足信息的传输、处理、存储、显示、记录和控制等要求,它是实现自动检测和自动控制的首要环节。物理传感器应用的是物理效应,比如光电效应、磁电效应等,能将被测信号量的微小变化转换成电信号。常见的物理传感器有超声波传感器、红外传感器、光电传感器等。
 (1)自动感应门有两种类型:一种是感应装置接收到人所发出的红外线,将门打开;另一种是感应装置发出微波来感知向门移动的物体,将门打开。以下设计方案能探究某自动门是哪种类型的是__________。
(1)自动感应门有两种类型:一种是感应装置接收到人所发出的红外线,将门打开;另一种是感应装置发出微波来感知向门移动的物体,将门打开。以下设计方案能探究某自动门是哪种类型的是__________。
A.速度相同的两个人分别向门靠近,观察门的反应
B.人以两种不同速度分别向门靠近,观察门的反应
C.门打开后,人在门前静止一段时间,观察门的反应
D.白天和黑夜让人向门靠近,观察门的反应
(2)如图26所示是利用超声波传感器制![]() 成的智能垃圾桶,
成的智能垃圾桶,
①根据使用者将要投掷的垃圾大小,打开相应大小的开口,避免过多异味散发出去,这是利用了声能传递_______________;
②智能垃圾桶打开开口时,会有异味散发出去,这属于物理学中的_____________现象;
③垃圾桶内部的红外线感应器还能检测垃圾桶肚子里的垃圾收纳程度,![]() 及时提醒使用者该清理垃圾了,能检测到垃圾桶的垃圾收纳程度是因为传感器能____________________。
及时提醒使用者该清理垃圾了,能检测到垃圾桶的垃圾收纳程度是因为传感器能____________________。
如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
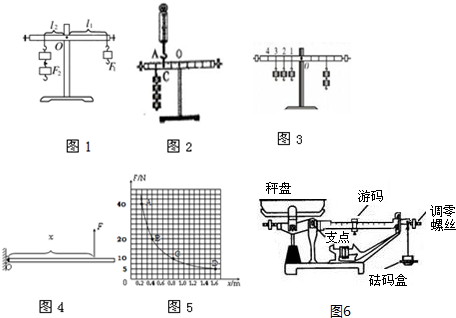
(1)实验前,应先调节杠杆在 位置平衡.这样做的目的是 ,调节时,发现杠杆左端偏低,则将左端螺母向 调节.
(2)某实验小组记录两组数据如下:
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小).
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图可知金属杆重 N.
(6)物理课本中有这样一句话“托盘天平是支点在中间的等臂杠杆,天平平衡时砝码的质量等于被测物体的质量”.实际上使用天平经常同时用到砝码和游码,此时被测物体的质量应 砝码的质量(填“大于”“小于”或“等于”).
(7)如图5所示的案秤是个不等臂杠杆,请你根据杠杆的平衡条件,说明用几个不重的砝码就能平衡盘中重得多的货物的道理 .
查看习题详情和答案>>
(1)实验前,应先调节杠杆在
(2)某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图可知金属杆重
(6)物理课本中有这样一句话“托盘天平是支点在中间的等臂杠杆,天平平衡时砝码的质量等于被测物体的质量”.实际上使用天平经常同时用到砝码和游码,此时被测物体的质量应
(7)如图5所示的案秤是个不等臂杠杆,请你根据杠杆的平衡条件,说明用几个不重的砝码就能平衡盘中重得多的货物的道理



