摘要:17.如图6所示.物体静止放在水平桌面上.请作出物体受到的力的示意图.
网址:http://m.1010jiajiao.com/timu3_id_1312550[举报]
如图1所示,物体A重100N,放在水平桌面上.物体B重40N,被悬挂在动滑轮的挂钩上.物体B在重力作用下向下运动并通过滑轮组牵拉物体A.不计滑轮自重和滑轮与轴间的摩擦.当物体B下降H后会落在地面上,从而停止对物体A的拉动.在右墙面上安装有“测距传感器”,它发出的超声波遇到物体A会反射回传感器,通过计算机能自动计算出物体A与传感器的距离(s),自动显示出 距离-时间(s-t)图象,如图2所示(其中0秒至4秒为倾斜向下的直线,4秒至6秒为曲线,6秒以后为水平直线).如果0秒时刚好是如图所示情境,试求:
①0秒至4秒期间,物体A受到绳子的拉力为
②4秒至6秒期间,物体A受到的水平方向的合力
③物体A静止以后,“测距传感器”发出的超声波,要经过大约
④0秒时,物体B到地面的距离H是

查看习题详情和答案>>
①0秒至4秒期间,物体A受到绳子的拉力为
20
20
N,拉力对物体A作的功大小是60
60
J.②4秒至6秒期间,物体A受到的水平方向的合力
不等于
不等于
(填“等于”或“不等于”)零.③物体A静止以后,“测距传感器”发出的超声波,要经过大约
5.88
5.88
ms时间才能收到反射波.④0秒时,物体B到地面的距离H是
1.5
1.5
m.
如图1所示,物体A重100N,放在水平桌面上.物体B重40N,被悬挂在动滑轮的挂钩上.物体B在重力作用下向下运动并通过滑轮组牵拉物体A.不计滑轮自重和滑轮与轴间的摩擦.当物体B下降H后会落在地面上,从而停止对物体A的拉动.在右墙面上安装有“测距传感器”,它发出的超声波遇到物体A会反射回传感器,通过计算机能自动计算出物体A与传感器的距离(s),自动显示出 距离-时间(s-t)图象,如图2所示(其中0秒至4秒为倾斜向下的直线,4秒至6秒为曲线,6秒以后为水平直线).如果0秒时刚好是如图所示情境,试求:
①0秒至4秒期间,物体A受到绳子的拉力为______N,拉力对物体A作的功大小是______J.
②4秒至6秒期间,物体A受到的水平方向的合力______(填“等于”或“不等于”)零.
③物体A静止以后,“测距传感器”发出的超声波,要经过大约______ ms时间才能收到反射波.
④0秒时,物体B到地面的距离H是______m.

查看习题详情和答案>>
①0秒至4秒期间,物体A受到绳子的拉力为______N,拉力对物体A作的功大小是______J.
②4秒至6秒期间,物体A受到的水平方向的合力______(填“等于”或“不等于”)零.
③物体A静止以后,“测距传感器”发出的超声波,要经过大约______ ms时间才能收到反射波.
④0秒时,物体B到地面的距离H是______m.
查看习题详情和答案>>
(1)如图1所示,某同学用弹簧秤拉着木块A在水平桌面上作匀速直线运动,这样做的目的
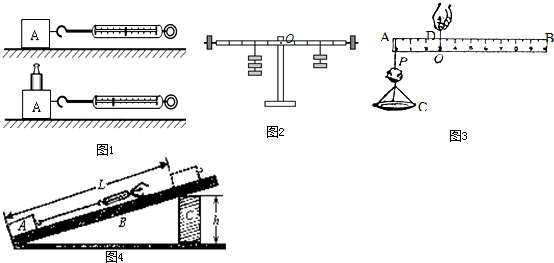
(2)如图2所示,是小明在“研究杠杆的平衡条件”的实验,当在杠杆左端距离O点二个格子的位置挂了三个等质量的钩码,当在另一端距离O点三个格子的位置挂两个等质量的钩码时,此时杠杆刚好平衡,若在两边钩码下方再各加挂一只相同的钩码,释放后观察到的现象将是什么?
小王认为:杠杆仍能保持平衡;小李认为:杠杆将顺时针转动;小赵认为:杠杆将逆时针转动;你支持
小明在实验后,用直尺AB制作杆秤,他在0刻度处用细线悬挂一个秤盘C,在3cm刻度处用细线D悬吊起来.他提起细线D“秤杆”(直尺)不能静止在水平位置.于是,他在秤盘悬线P处粘上适量的橡皮泥,使“秤杆”能在水平位置静止(如图3).他“粘上适量橡皮泥”的做法类似于“研究杠杆的平衡条件”实验中
(3)如图4是小红同学探究影响斜面机械效率因素的实验装置.
实验准备的器材有:三个质量不同的木块A; 三条粗糙程度不同的长木板B;三个高度不同的长方体铁块C; 刻度尺;弹簧测力计等.
下表是小红探究斜面机械效率与物重的关系时所记录的相关数据.
通过分析数据,你可以得出结论:
若保持斜面长度不变,将斜面高h变为0.2m,再将重为3N的物体沿斜面向上拉时,所需拉力为2N,则此时斜面的机械效率是
查看习题详情和答案>>
利用二力平衡知识间接测量f滑
利用二力平衡知识间接测量f滑
,在木块上加砝码后,发现弹簧秤的示数将变大
变大
(选填“变小”、“变大”或“不变”),由此得出的结论是接触面粗糙程度一定时,压力越大,滑动摩擦力越大
接触面粗糙程度一定时,压力越大,滑动摩擦力越大
.(2)如图2所示,是小明在“研究杠杆的平衡条件”的实验,当在杠杆左端距离O点二个格子的位置挂了三个等质量的钩码,当在另一端距离O点三个格子的位置挂两个等质量的钩码时,此时杠杆刚好平衡,若在两边钩码下方再各加挂一只相同的钩码,释放后观察到的现象将是什么?
小王认为:杠杆仍能保持平衡;小李认为:杠杆将顺时针转动;小赵认为:杠杆将逆时针转动;你支持
小李
小李
的观点,理由是左端的力和力臂的乘积小于右端的力和力臂的乘积
左端的力和力臂的乘积小于右端的力和力臂的乘积
.小明在实验后,用直尺AB制作杆秤,他在0刻度处用细线悬挂一个秤盘C,在3cm刻度处用细线D悬吊起来.他提起细线D“秤杆”(直尺)不能静止在水平位置.于是,他在秤盘悬线P处粘上适量的橡皮泥,使“秤杆”能在水平位置静止(如图3).他“粘上适量橡皮泥”的做法类似于“研究杠杆的平衡条件”实验中
调节杠杆两端的平衡螺母
调节杠杆两端的平衡螺母
的做法,这样做的目的是使杠杆在水平位置平衡,便于从杠杆上直接读出力臂
使杠杆在水平位置平衡,便于从杠杆上直接读出力臂
.(3)如图4是小红同学探究影响斜面机械效率因素的实验装置.
实验准备的器材有:三个质量不同的木块A; 三条粗糙程度不同的长木板B;三个高度不同的长方体铁块C; 刻度尺;弹簧测力计等.
下表是小红探究斜面机械效率与物重的关系时所记录的相关数据.
| 测量次序 | 斜面粗糙程度 | 物重G(N) | 斜面高 h(m) |
沿斜面的拉力F(N) | 斜面长L(m) | 有用功 W有(J) |
总功 W总(J) |
机械效率η |
| 1 | 较粗糙 | 1.5 | 0.1 | 0.6 | 0.4 | 0.15 | 0.24 | 62.5% |
| 2 | 较粗糙 | 3 | 0.1 | 1.2 | 0.4 | 0.3 | 0.48 | 62.5% |
| 3 | 较粗糙 | 6 | 0.1 | 2.4 | 0.4 | 0.6 | 0.96 | 62.5% |
斜面的机械效率与被提升的物体的重量无关
斜面的机械效率与被提升的物体的重量无关
;若保持斜面长度不变,将斜面高h变为0.2m,再将重为3N的物体沿斜面向上拉时,所需拉力为2N,则此时斜面的机械效率是
75%
75%
;说明斜面机械效率与斜面的倾斜程度
斜面的倾斜程度
有关.除此之外,你认为斜面的机械效率还可能与斜面的斜面的光滑程度
斜面的光滑程度
有关.
小刚为测量某金属块的密度:

(1)将托盘天平放在水平桌面上,调节横梁平衡时,先将游码移到
A.向右移动游码,使横梁平衡知B.向右移动平衡螺母,使横梁平衡
小刚设计的实验步骤是:
①在量筒中倒入适量的水,液面示数为V1 ②把金属块浸没在量筒内的水中,此时液面示数为V2 ③用天平测出金属块的质量为m ④计算出金属块的密度
(2)为了更准确地测出金属块的密度,你认为以上操作的合理顺序是
(3)小刚按图乙所示的方法测金属块的质量,请指出操作中的两个错误:①
(4)纠正错误后继续实验,当盘中所加砝码和游码位置如图丙所示时天平平衡,则所测金属块的质量是
(5)该金属块放入前、后的情况如图丁所示,则金属块的体积是
查看习题详情和答案>>
(1)将托盘天平放在水平桌面上,调节横梁平衡时,先将游码移到
零刻度线
零刻度线
处.天平指针静止时的位置如图甲所示,接下来应进行的操作是B
B
(填写字母代号).A.向右移动游码,使横梁平衡知B.向右移动平衡螺母,使横梁平衡
小刚设计的实验步骤是:
①在量筒中倒入适量的水,液面示数为V1 ②把金属块浸没在量筒内的水中,此时液面示数为V2 ③用天平测出金属块的质量为m ④计算出金属块的密度
(2)为了更准确地测出金属块的密度,你认为以上操作的合理顺序是
3、2、1、4
3、2、1、4
.(填数字代号)(3)小刚按图乙所示的方法测金属块的质量,请指出操作中的两个错误:①
砝码和物的位置放反了
砝码和物的位置放反了
;②用手直接拿砝码
用手直接拿砝码
.(4)纠正错误后继续实验,当盘中所加砝码和游码位置如图丙所示时天平平衡,则所测金属块的质量是
23.4
23.4
g.(5)该金属块放入前、后的情况如图丁所示,则金属块的体积是
9
9
cm3,此金属块的密度是2.6×103
2.6×103
kg/m3.金属块有磨损后,它的密度不变
不变
(选填“变大”、“不变”或“变小”).