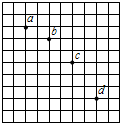
 在“探究平抛运动的运动规律”的实验中,可以描绘出小球平抛运动的轨迹,实验简要步骤如下:
在“探究平抛运动的运动规律”的实验中,可以描绘出小球平抛运动的轨迹,实验简要步骤如下:

4.2014年11月1日,嫦娥五号再入返回飞行试验返回器在内蒙古四子王旗预定区域顺利着陆,这标志着中国探月工程三期再入返回飞行试验获得圆满成功.若该试验器在地球表面的重力为G1,在月球表面的重力为G2,已知地球半径为R1,月球半径R2,地球表面处的重力加速度为g,则下列说法中正确的是( )
| A. | 月球表面处的重力加速度为$\frac{{G}_{1}g}{{G}_{2}}$ | |
| B. | 月球质量与地球质量之比为$\frac{{G}_{2}{{R}_{2}}^{2}}{{G}_{1}{{R}_{1}}^{2}}$ | |
| C. | 该试验器在靠近月球表面轨道上做匀速圆周运动的周期为T=2π$\sqrt{\frac{{G}_{1}{R}_{2}}{{G}_{2}{R}_{1}}}$ | |
| D. | 月球的第一宇宙速度与地球的第一宇宙速度之比为$\sqrt{\frac{{G}_{2}{R}_{2}}{{G}_{1}{R}_{1}}}$ |
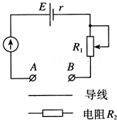
2.下列关于电源电动势的说法,正确的是( )
| A. | 电动势实质上就是电压 | |
| B. | 电动势在数值上等于在电源内部移动单位电荷非静电力所做的功 | |
| C. | 电动势是指电源内部非静电力所做的功 | |
| D. | 电动势越大,表明电源把电能转化为其他形式的能的本领越大 |
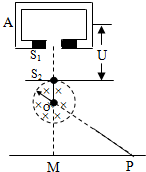 图为测量某种离子的荷质比实验装置示意图.让中性气体分子进入电离室A,在那里被电离成离子,这些离子从电离室的小孔飘出,从缝S1进入电压为U的加速电场被加速,然后从缝S2垂直进入一圆形匀强磁场区,最后电子束射到屏幕的P点.圆形匀强磁场区的磁感应强度为B,磁场方向垂直于圆面,磁场区的中心为O,半径为r.当不加磁场时,电子束将通过O点打到屏幕的中心M点.圆形匀强磁场区的中心O到荧光屏的距离0M=L,测得MP之间的距离为h,且恰好有h:L=$\sqrt{3}$:1,求该离子的荷质比的表达式.
图为测量某种离子的荷质比实验装置示意图.让中性气体分子进入电离室A,在那里被电离成离子,这些离子从电离室的小孔飘出,从缝S1进入电压为U的加速电场被加速,然后从缝S2垂直进入一圆形匀强磁场区,最后电子束射到屏幕的P点.圆形匀强磁场区的磁感应强度为B,磁场方向垂直于圆面,磁场区的中心为O,半径为r.当不加磁场时,电子束将通过O点打到屏幕的中心M点.圆形匀强磁场区的中心O到荧光屏的距离0M=L,测得MP之间的距离为h,且恰好有h:L=$\sqrt{3}$:1,求该离子的荷质比的表达式.
20.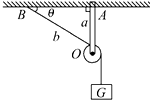 如图所示,在水平天花板的A点处固定一根轻杆a,杆与天花板保持垂直.杆的下端有一个轻滑轮O.另一根细线上端固定在该天花板的B点处,细线跨过滑轮O,下端系一个重为G的物体,BO段细线与天花板的夹角θ=30°.系统保持静止,不计一切摩擦.下列说法中错误的是( )
如图所示,在水平天花板的A点处固定一根轻杆a,杆与天花板保持垂直.杆的下端有一个轻滑轮O.另一根细线上端固定在该天花板的B点处,细线跨过滑轮O,下端系一个重为G的物体,BO段细线与天花板的夹角θ=30°.系统保持静止,不计一切摩擦.下列说法中错误的是( )
0 148679 148687 148693 148697 148703 148705 148709 148715 148717 148723 148729 148733 148735 148739 148745 148747 148753 148757 148759 148763 148765 148769 148771 148773 148774 148775 148777 148778 148779 148781 148783 148787 148789 148793 148795 148799 148805 148807 148813 148817 148819 148823 148829 148835 148837 148843 148847 148849 148855 148859 148865 148873 176998
如图所示,在水平天花板的A点处固定一根轻杆a,杆与天花板保持垂直.杆的下端有一个轻滑轮O.另一根细线上端固定在该天花板的B点处,细线跨过滑轮O,下端系一个重为G的物体,BO段细线与天花板的夹角θ=30°.系统保持静止,不计一切摩擦.下列说法中错误的是( )| A. | 细线BO对天花板的拉力大小是$\frac{G}{2}$ | B. | a杆对滑轮的作用力大小是$\frac{G}{2}$ | ||
| C. | a杆和细线对滑轮的合力大小是G | D. | a杆对滑轮的作用力大小是G |