题目内容
4.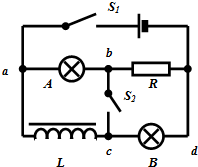 如图所示的电路中,电灯A和B与固定电阻的阻值均为R,L是自感系数较大的线圈.当S1闭合、S2断开且电路稳定时,AB亮度相同,再闭合S2,待电路稳定后将S1断开时,下列说法正确的是( )
如图所示的电路中,电灯A和B与固定电阻的阻值均为R,L是自感系数较大的线圈.当S1闭合、S2断开且电路稳定时,AB亮度相同,再闭合S2,待电路稳定后将S1断开时,下列说法正确的是( )| A. | 灯A将比原来更亮一些后再熄灭 | B. | 灯B立即熄灭 | ||
| C. | 有电流通过A灯,方向为b-A-a | D. | 有电流通过B灯,方向为c-B-d |
分析 在开关闭合瞬间,线圈阻碍电流的增加,断开S1瞬间产生一自感电动势相当于电源,与A组成闭合回路.根据楞次定律分析自感电流的方向.
解答 解:S1闭合、S2断开且电路稳定时两灯亮度相同,说明L的直流电阻亦为R.闭合S2后,L与A灯并联,R与B灯并联,它们的电流均相等.当断开S1时,灯B中电流立即为零,则灯B立即熄灭.线框L中电流将要减小,会产生自感电动势,由楞次定律知,自感电动势将阻碍L中电流的减小,即该电流还会维持一段时间,在这段时间里,因S2闭合,电流不可能经过B灯和R,只能通过A灯,形成b→A→a的电流,故AD错误,BC正确.
故选:BC.
点评 解决本题的关键是理解自感现象,会用楞次定律判断自感电动势的方向,掌握自感的作用.做好本类题目要注意线圈与哪个电器配合.

练习册系列答案
相关题目
14.已知一宇宙飞船先在半径为R的轨道上绕地球做匀速圆周运动,后开动发动机变轨到半径为2R的轨道上运动,则下列说法正确的是( )
| A. | 由v=rω,半径增大到原来的两倍时,速度增大到原来的2倍 | |
| B. | 由F=m$\frac{v^2}{r}$,轨道半径增大到原来的两倍时,速度增大到原来的$\sqrt{2}$倍 | |
| C. | 由F=G$\frac{Mm}{r^2}$,轨道半径增大到原来的两倍时,向心力减为原来的$\frac{1}{4}$ | |
| D. | 由F=m$\frac{v^2}{r}$,轨道半径增大到原来的两倍时,向心力减为原来的F=m$\frac{v^2}{r}$ |
 如图所示,质量为m=5kg的金属块放在水平地面上,在与水平方向成θ=37°角斜向上的拉力F=20N作用下向右做匀速直线运动,(sin37°=0.6,cos37°=0.8,g=10m/s2)求:
如图所示,质量为m=5kg的金属块放在水平地面上,在与水平方向成θ=37°角斜向上的拉力F=20N作用下向右做匀速直线运动,(sin37°=0.6,cos37°=0.8,g=10m/s2)求:
12.下列说法正确的是( )
| A. | 丹麦天文学家第谷通过长期的天文观测,指出所有行星绕太阳运动的轨道都是椭圆,揭示了行星运动的有关规律 | |
| B. | 卫星轨道必为圆形,卫星运行速度总不超过7.9km/s | |
| C. | 卫星运行速度与卫星质量无关 | |
| D. | 卫星轨道可以与纬度不为零的某条纬线在同一平面内 |
19.物理学的发展丰富了人类对物质世界的认识,推动了科学技术的创新和革命,促进了物质生产的繁荣与人类文明的进步.下列叙述符合历史事实的是( )
| A. | 亚里士多德发现了力是改变物体运动状态的原因 | |
| B. | 牛顿发现了行星的运动规律 | |
| C. | 开普勒发现了万有引力定律 | |
| D. | 卡文迪许第一次在实验室里测出了万有引力常量 |
9.2012年4月30日,我国成功发射两颗北斗导航卫星,卫星顺利进入预定转移轨道.2020年左右,我国将建成由30余颗卫星组成的北斗卫星导航系统,提供覆盖全球的高精度、高可靠的定位、导航和授时服务.北斗导航系统中有几颗卫星是地球同步卫星,设其中某颗同步卫星质量为m,如果地球半径为R,自转角速度为ω,表面重力加速度为g,关于同步卫星以下说法正确的是( )
| A. | 受到地球引力为mg | B. | 卫星运行方向与地球自转方向相同 | ||
| C. | 距地面的高度h=$\root{3}{\frac{g{R}^{2}}{{ω}^{2}}}$-R | D. | 可以定点于北京上空 |
16. 一列波长大于1m的横波沿着x轴正方向传播,处在x1=1m和x2=2m的两质点A、B的振动图象如图所示.由此可知( )
一列波长大于1m的横波沿着x轴正方向传播,处在x1=1m和x2=2m的两质点A、B的振动图象如图所示.由此可知( )
一列波长大于1m的横波沿着x轴正方向传播,处在x1=1m和x2=2m的两质点A、B的振动图象如图所示.由此可知( )| A. | 波长为4m | B. | 波长为$\frac{4}{3}$m | ||
| C. | 1.5s末A、B两质点的速度相同 | D. | 1.5s末A、B两质点的位移大小相等 |
12.子弹以一定的初速度射入放在光滑水平面上的木块中,并共同运动下列说法中正确的是( )
| A. | 子弹克服阻力做的功等于木块动能的增加与摩擦生的热的总和 | |
| B. | 木块对子弹做功的绝对值等于子弹对木块做的功 | |
| C. | 木块对子弹的冲量大小等于子弹对木块的冲量 | |
| D. | 系统损失的机械能等于子弹损失的动能和子弹对木块所做的功的差 |
13.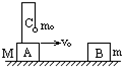 如图所示,质量为M的木块A上挂一单摆,摆球C质量为m0,它们以相同的速度v0沿光滑水平面运动,与静止放在水平面上的质量为m的木块B发生碰撞.设碰撞时间极短,在此碰撞过程中,如下说法可能发生的是( )
如图所示,质量为M的木块A上挂一单摆,摆球C质量为m0,它们以相同的速度v0沿光滑水平面运动,与静止放在水平面上的质量为m的木块B发生碰撞.设碰撞时间极短,在此碰撞过程中,如下说法可能发生的是( )
如图所示,质量为M的木块A上挂一单摆,摆球C质量为m0,它们以相同的速度v0沿光滑水平面运动,与静止放在水平面上的质量为m的木块B发生碰撞.设碰撞时间极短,在此碰撞过程中,如下说法可能发生的是( )| A. | A、B、C的速度都发生变化,分别为v1、v2、v3,且满足(M+m0) v0=M v1+m v2+m0 v3 | |
| B. | C的速度不变,A、B的速度变为v,且满足Mv0=(M+m) v | |
| C. | C的速度不变,A、B的速度变为v1和v2,且满足Mv0=Mv1+mv2 | |
| D. | A、C的速度都变为v1,B的速度变为v2,且满足(M+m0) v0=(M+m0) v1+mv2 |