题目内容
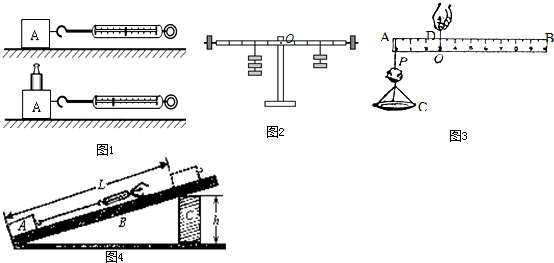
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在

上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中.
(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验存在错误,其错误是
水平
水平
位置平衡,这样做是为了便于测量力臂
便于测量力臂
.上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 10 | |
| 3 | 1 | 20 | 1.5 | 10 |
(2)小明的第3次实验存在错误,其错误是
动力臂测量错误
动力臂测量错误
.分析:(1)探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(2)①根据表格中提供的数据和杠杆平衡条件F1L1=F2L2进行计算;
②由图可见,第3次实验中拉力的方向没有竖直向下,导致力臂不能从杠杆上正确读出.
(2)①根据表格中提供的数据和杠杆平衡条件F1L1=F2L2进行计算;
②由图可见,第3次实验中拉力的方向没有竖直向下,导致力臂不能从杠杆上正确读出.
解答:解:力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来,便于测量力臂;
(1)第1次实验中:F1L1=F2L2=1.5N×10cm=15N?cm;
L2=
=
=15cm;
第2次实验中:F1L1=F2L2=1N×20cm=20N?cm;
F2=
=
=2N;
(2)第3次实验中,拉力的方向向右倾斜,拉力的力臂不等于20cm.
故答案为:水平;便于测量力臂;
(1)
(2)动力臂测量错误.
(1)第1次实验中:F1L1=F2L2=1.5N×10cm=15N?cm;
L2=
| F1L1 |
| F2 |
| 15N?cm |
| 1N |
第2次实验中:F1L1=F2L2=1N×20cm=20N?cm;
F2=
| F1L1 |
| L2 |
| 20N?cm |
| 10cm |
(2)第3次实验中,拉力的方向向右倾斜,拉力的力臂不等于20cm.
故答案为:水平;便于测量力臂;
(1)
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | 15 |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
点评:此题是“探究杠杆的平衡条件”实验,考查了杠杆的调平及目的,杠杆平衡条件的应用,及对力臂概念的理解,都是杠杆平衡条件中的常见知识.

练习册系列答案
 学期复习一本通学习总动员期末加暑假延边人民出版社系列答案
学期复习一本通学习总动员期末加暑假延边人民出版社系列答案 芒果教辅暑假天地重庆出版社系列答案
芒果教辅暑假天地重庆出版社系列答案
相关题目


甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论
| 甲 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 7 | 4 | 2 | 14 | |
| 2 | 6 | 4 | 8 | 3 | |
| 3 | 4 | 5 | 2 | 10 | |
| 结论 | 动力*动力臂=阻力*阻力臂 | ||||
| 乙 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 3 | 4 | 4 | 3 | |
| 2 | 4 | 5 | 5 | 4 | |
| 结论 | 动力+动力臂=阻力+阻力臂 | ||||
他们在交流时,乙组发现了自己实验结论的错误和出现错误的原因。你认为乙组出现错误的原因有哪些?请找出两条.
原因①:________________________________________________________________.
原因②:________________________________________________________________.

