题目内容
 在探究“杠杆的平衡条件”的实验中,有甲、乙两位同学作出了如下的猜想:甲的猜想:
在探究“杠杆的平衡条件”的实验中,有甲、乙两位同学作出了如下的猜想:甲的猜想:| 动力 |
| 动力臂 |
| 阻力 |
| 阻力臂 |
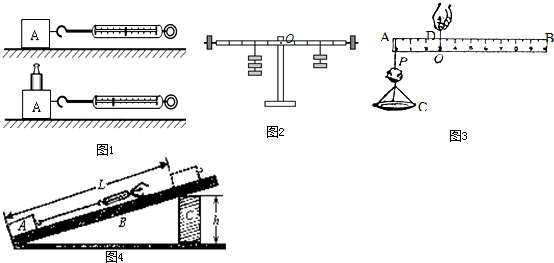
A.按如图所示的装置安装实验器材.
B.在没有挂钩码时,调节杠杆在
水平
水平
位置平衡.C.将钩码(每个钩码的质量均为50g)分别挂在杠杆的两边并移动其悬挂的位置,重新将杠杆调节至水平位置平衡.
D.改变悬挂的钩码个数,并移动其悬挂的位置,使杠杆又在水平位置平衡.再将每次实验测得的数据都记录在下表中.
| 实验 序号 |
动力 F1/N |
动力臂 L1/cm |
阻力 F2/N |
阻力臂 L2/cm |
| 1 | 0.5 | 5.42 | 2.0 | 1.36 |
| 2 | 1.0 | 4.00 | ||
| 3 | 1.5 | 2.60 | 1.0 | 3.90 |
(2)在实验中,调节杠杆在水平位置平衡的目的是
便于测量力臂
便于测量力臂
.(3)综上所述
乙
乙
的猜想是正确的.分析:实验前要条件杠杆在水平位置平衡;
(1)由图示求出阻力臂大小,然后由杠杆平衡条件求出阻力大小;
(2)杠杆在水平位置平衡,力臂在杠杆上,可以直接从杠杆上读取力臂;
(3)分析表中实验数据,然后得出结论.
(1)由图示求出阻力臂大小,然后由杠杆平衡条件求出阻力大小;
(2)杠杆在水平位置平衡,力臂在杠杆上,可以直接从杠杆上读取力臂;
(3)分析表中实验数据,然后得出结论.
解答:解:B、在没有挂钩码时,调节杠杆在 水平位置平衡.
(1)由图示可知,阻力臂L2=8.20cm,
由杠杆平衡条件可得:F1×L1=F2×L2,
即:1N×4.00cm=F2×8.20cm,阻力F2≈0.49N;
(2)调节杠杆在水平位置平衡的目的是 便于测量力臂.
(3)由表中实验数据可知,:动力×动力臂=阻力×阻力臂,故乙的猜想是正确的.
故答案为:水平;(1)0.49;8.20;(2)便于测量力臂;(3)乙.
(1)由图示可知,阻力臂L2=8.20cm,
由杠杆平衡条件可得:F1×L1=F2×L2,
即:1N×4.00cm=F2×8.20cm,阻力F2≈0.49N;
(2)调节杠杆在水平位置平衡的目的是 便于测量力臂.
(3)由表中实验数据可知,:动力×动力臂=阻力×阻力臂,故乙的猜想是正确的.
故答案为:水平;(1)0.49;8.20;(2)便于测量力臂;(3)乙.
点评:此题是探究杠杆平衡条件的实验,在此实验中要知道使杠杆在水平位置平衡为了便于测量力臂.为使实验结论具有普遍性的规律,需要多测几组数据.并且考查了杠杆的平衡条件,F1?l1=F2?l2.

练习册系列答案
相关题目


甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论
| 甲 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 7 | 4 | 2 | 14 | |
| 2 | 6 | 4 | 8 | 3 | |
| 3 | 4 | 5 | 2 | 10 | |
| 结论 | 动力*动力臂=阻力*阻力臂 | ||||
| 乙 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 3 | 4 | 4 | 3 | |
| 2 | 4 | 5 | 5 | 4 | |
| 结论 | 动力+动力臂=阻力+阻力臂 | ||||
他们在交流时,乙组发现了自己实验结论的错误和出现错误的原因。你认为乙组出现错误的原因有哪些?请找出两条.
原因①:________________________________________________________________.
原因②:________________________________________________________________.

