题目内容
9.关于力的概念,下列说法中正确的是( )| A. | 力可以脱离物体而单独存在 | |
| B. | 没有接触的物体之间也可能产生弹力 | |
| C. | 相互接触的物体之间一定会有力的作用 | |
| D. | 没有接触的物体之间也可能有力的作用 |
分析 ①力是物体对物体的作用,可知产生力的条件必须满足两个:一是必须要有两个物体,一个物体不能产生力,二是物体间要发生作用;
②力的作用方式有两种:直接接触,如推、拉、压;不接触,如吸引;
③物体由于发生弹性形变而产生的力叫弹力.
解答 解:
A、因为力是物体对物体的作用,没有物体就没有力的作用.故A错误;
B、没有相互接触的物体之间不能发生弹性形变,所以不存在弹力.故B错误;
C、由力的概念可知,物体间要产生力,物体间必须要发生作用.如果只接触但不发生作用,就不会产生力,故C错误;
D、不接触的物体间也会产生力的作用,如重力和磁体间的磁力,故D正确.
故选D.
点评 本题考查了力的概念、力的作用方式和产生弹力的条件.对于物理课本上的概念,我们不能只凭死记硬背,一定要理解概念所描述的内容.

练习册系列答案
相关题目
 小明利用最大刻度值标有2.5mL的一次性注射器等器材,对大气压的值进行测量.其实验步骤如下:
小明利用最大刻度值标有2.5mL的一次性注射器等器材,对大气压的值进行测量.其实验步骤如下:
18.探究“杠杆的平衡条件”
(1)实验时让杠杆在水平位置平衡,这样可以直接从杠杆上读出力臂.
(2)如图甲,为使杠杆在水平位置平衡,应将平衡螺母向右(选填“左”或“右”)移动.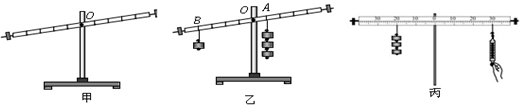
(3)实验记录的数据如表中所示,收集多组数据的目的是探究杠杆平衡所遵循的普遍规律;实验得到的结论是F1×L1=F2×L2(用字母符号表示).
(4)小红调节好杠杆平衡后,在杠杆两端挂上钩码,杠杆的状态如图乙所示,为此,小红又调节两端的平衡螺母,使杠杆重新回到水平平衡位置,然后正确记录下钩码重、动力臂OA和阻力臂OB的值,分析实验数据后发现得不到教材中的“杠杆平衡条件”,小红的哪一步操作导致了实验结果与教材中的结论不一致?答:在杠杆两端挂上钩码后,不应调节平衡螺母,应通过加减钩码或改变钩码悬挂的位置使杠杆重新平衡.
(5)图丙中杠杆处于平衡状态,每个钩码受到的重力是0.5N,则弹簧测力计竖直向下的拉力是1N;拉着弹簧测力计,逐渐向右倾斜,并保持杠杆在水平位置平衡,弹簧测力计的示数将变大,原因是弹簧测力计拉力的力臂减小.
(1)实验时让杠杆在水平位置平衡,这样可以直接从杠杆上读出力臂.
(2)如图甲,为使杠杆在水平位置平衡,应将平衡螺母向右(选填“左”或“右”)移动.

(3)实验记录的数据如表中所示,收集多组数据的目的是探究杠杆平衡所遵循的普遍规律;实验得到的结论是F1×L1=F2×L2(用字母符号表示).
| 实验次数 | 动力 F1/N | 动力臂 L1/cm | 阻力 F2/N | 阻力臂 L2/cm |
| 1 | 0.5 | 10 | 1 | 5 |
| 2 | 0.5 | 15 | 1.5 | 5 |
| 3 | 1.5 | 20 | 3 | 10 |
| 4 | 2 | 20 | 4 | 10 |
(5)图丙中杠杆处于平衡状态,每个钩码受到的重力是0.5N,则弹簧测力计竖直向下的拉力是1N;拉着弹簧测力计,逐渐向右倾斜,并保持杠杆在水平位置平衡,弹簧测力计的示数将变大,原因是弹簧测力计拉力的力臂减小.
19.关于力的概念,下列哪句话是错误的( )
| A. | 没有物体就没有力 | |
| B. | 有受力物体时,一定有施力物体 | |
| C. | 有施力物体时,却不一定有受力物体 | |
| D. | 只有一个物体时,不会有力 |