题目内容
6. 如图所示,甲、乙表示力的作用效果.其中甲图表示了力可以使物体发生形变;乙图表示了力可以使物体运动状态发生改变.
如图所示,甲、乙表示力的作用效果.其中甲图表示了力可以使物体发生形变;乙图表示了力可以使物体运动状态发生改变.
分析 力的作用效果是使物体产生形变或是物体的运动状态发生改变,从此角度入手分析.
解答 解:力可以改变物体的形状,或者使物体的运动状态发生改变.
在拉力的作用下,甲图弹簧长度变大,形状发生改变.说明力可以改变物体的形状;
物体的运动状态包括速度和方向两个方面,在头的作用下,乙图中足球的运动方向发生改变,即运动状态改变.说明力可以改变物体的运动状态.
故答案为:形变;运动状态.
点评 形变通常表现为体积的改变、长度的改变等,运动状态的改变表现为速度方向、速度大小的改变,这都是力的作用效果.

练习册系列答案
相关题目
 一个质量为5kg的物体放在水平桌面上,在大小为0.2倍重力的拉力下匀速直线运动,则物体的重力为49N,物体受到地面的支持力为49N,所受到的拉力为9.8 N,摩擦力为9.8 N.
一个质量为5kg的物体放在水平桌面上,在大小为0.2倍重力的拉力下匀速直线运动,则物体的重力为49N,物体受到地面的支持力为49N,所受到的拉力为9.8 N,摩擦力为9.8 N.
14. 如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )
如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )
如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )| A. | 当机器人在竖直玻璃板上静止时,继续向外抽气,受到的摩擦力变大 | |
| B. | 若吸盘对玻璃的压强为1.5×105Pa,则吸盘对玻璃的压力为100N | |
| C. | 当机器人向下运动时,继续向外抽气,受到的摩擦力变大 | |
| D. | 若机器人在6s内匀速竖直向下运动了0.6m,重力做功的功率是1W |
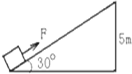 如图所示,将一个重为10N的木块沿倾角为30°斜面匀速向上拉至顶端,拉力为8N,斜面高5m,拉力做功为80J,木块所受的摩擦力为3N.若仅使倾角θ逐渐增大,沿斜面向上的拉力将逐渐增大(选填“增大”、“不变”或“减小”).
如图所示,将一个重为10N的木块沿倾角为30°斜面匀速向上拉至顶端,拉力为8N,斜面高5m,拉力做功为80J,木块所受的摩擦力为3N.若仅使倾角θ逐渐增大,沿斜面向上的拉力将逐渐增大(选填“增大”、“不变”或“减小”). 将一个实心立方体轻轻地放入盛满水的大烧杯内,待木块静止时,
将一个实心立方体轻轻地放入盛满水的大烧杯内,待木块静止时,
18.在“测定金属块密度实验”中
(1)使用天平之前,应先调节天平横梁平衡,当把游码移至称量标尺左端的“0”刻线上,发现指针在分度标尺上的位置如图2所示,则下列可使天平平衡的方法是A.
A.将平衡螺母向左移动 B.减少右盘中的砝码
C.将游码向右移动一点 D.增加右盘中的砝码
(2)在已调节好的天平上称金属块,又发现指针偏转情况如上图所示,则下列可使天平平衡的方法是B (选项同上).

(3)当天平平衡时,右盘所放砝码及游码的位置、量筒的水位如图2,请将下表填写完整:
(1)使用天平之前,应先调节天平横梁平衡,当把游码移至称量标尺左端的“0”刻线上,发现指针在分度标尺上的位置如图2所示,则下列可使天平平衡的方法是A.
A.将平衡螺母向左移动 B.减少右盘中的砝码
C.将游码向右移动一点 D.增加右盘中的砝码
(2)在已调节好的天平上称金属块,又发现指针偏转情况如上图所示,则下列可使天平平衡的方法是B (选项同上).
(3)当天平平衡时,右盘所放砝码及游码的位置、量筒的水位如图2,请将下表填写完整:
| 金属块质量/g | 78 |
| 水的体积/cm3 | 60 |
| 水和金属块总体积/cm3 | 80 |
| 金属块的体积/cm3 | 20 |
| 金属块的密度kg/m3 | 3.9×103 |
15. 在“研究杠杆平衡条件”的实验中.
在“研究杠杆平衡条件”的实验中.
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向左边旋转,使杠杆在水平位置平衡.(填“左”或“右”)
(2)杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2格的A处挂了3个钩码,如图所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是3处挂2个钩码.
(3)实验中得到两组数据如表所示:
这两组数据中,实验序号为1的一组数据肯定有错误.经检查,发现是测量动力臂时读错了,动力臂应该是0.6 m.
(4)通过实验探究应该得出的结论是F1L1=F2L2.
在“研究杠杆平衡条件”的实验中.(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,可将右端螺母向左边旋转,使杠杆在水平位置平衡.(填“左”或“右”)
(2)杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2格的A处挂了3个钩码,如图所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是3处挂2个钩码.
(3)实验中得到两组数据如表所示:
| 实验序号 | 动力F1/N | 动力臂l1/m | 阻力F2/N | 阻力臂l2/m |
| 1 | 1 | 0.2 | 6 | 0.1 |
| 2 | 2 | 0.4 | 4 | 0.2 |
(4)通过实验探究应该得出的结论是F1L1=F2L2.
