题目内容
在做“研究杠杆平衡条件”的实验中,某同学把杠杆的中点支放在支架上,调节杠杆的平衡螺母,使杠杆在
他把测得的数据填入下表,为了归纳出结论,应在下表中增加栏目,请你帮他把表格中空白的项目填完整.
水平
水平
位置平衡,其目的主要是便于测量力臂
便于测量力臂
,消除杠杆自重的影响
消除杠杆自重的影响
.他把测得的数据填入下表,为了归纳出结论,应在下表中增加栏目,请你帮他把表格中空白的项目填完整.
| 实验序号 | 动力(F1) (牛) |
动力臂(l1) (米) |
阻力(F2) (牛) |
阻力臂(l2) (米) |
||
| 1 | 3 | 0.04 | 2 | 0.06 | ||
| 2 | 2 | 0.08 | 4 | 0.04 | ||
| 3 | 1 | 0.06 | 3 | 0.02 |
分析:(1)在研究杠杆平衡条件实验前,应先把杠杆的中点支在支架上,为了便于测量力臂,应调节平衡螺母使杠杆在水平位置保持平衡.
(2)应求出动力与动力臂的乘积,阻力与阻力臂的乘积,据此完成表格.
(2)应求出动力与动力臂的乘积,阻力与阻力臂的乘积,据此完成表格.
解答:解:(1)在“研究杠杆平衡的条件”实验中,实验前应首先把杠杆的中点支在支架上,并调节平衡螺母,使杠杆在水平位置平衡;
此时力臂恰好沿着杠杆的方向,可以直接从杠杆上读出力臂,所以这样做的目的是便于测量力臂,同时可以消除杠杆自重对实验的影响.
(2)表中应求出动力与动力臂的乘积,阻力与阻力臂的乘积,如下表所示:
故答案为:水平;便于测量力臂;消除杠杆自重的影响;如上表所示.
此时力臂恰好沿着杠杆的方向,可以直接从杠杆上读出力臂,所以这样做的目的是便于测量力臂,同时可以消除杠杆自重对实验的影响.
(2)表中应求出动力与动力臂的乘积,阻力与阻力臂的乘积,如下表所示:
| 实验序号 | 动力(F1) (牛) |
动力臂(l1) (米) |
阻力(F2) (牛) |
阻力臂(l2) (米) |
F1×l1(N?m) | F2×l2(N?m) |
| 1 | 3 | 0.04 | 2 | 0.06 | 0.12 | 0.12 |
| 2 | 2 | 0.08 | 4 | 0.04 | 0.16 | 0.16 |
| 3 | 1 | 0.06 | 3 | 0.02 | 0.06 | 0.06 |
点评:此题是探究杠杆平衡条件中的一个重要环节,为了便于测量力臂,应调节平衡螺母使杠杆在水平位置保持平衡.

练习册系列答案
 课堂全解字词句段篇章系列答案
课堂全解字词句段篇章系列答案 步步高口算题卡系列答案
步步高口算题卡系列答案
相关题目
 (2007?越秀区一模)(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使
(2007?越秀区一模)(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使 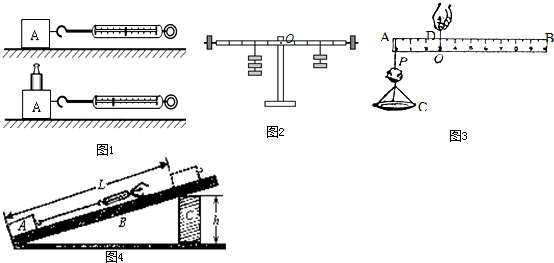
 (1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使
(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使
______;小明用如图所示的装置验证杠杆的平衡条件,调节右边钩码的个数和悬挂位置,使杠杆水平平衡时,读出弹簧测力计的示数F1=1.1N,钩码对杠杆的拉力F2=1.47N,测得支点O到这两个作用点的距离L1=20cm,L2=10cm,他将所得数据直接代入杠杆平衡条件的公式中,发现F1?L1和F2?L2并不相等,从而认为杠杆的平衡条件不一定是F1?L1=F2?L2,小明的失误地方是______.
(2)交流与评估是科学探究中的一个重要环节.在探究滑轮组机械效率与物重关系的实验中,小明和小峰用同一滑轮组装置做了三次实验,测得的有关数据如下表所示.
| 实验次数 | 重物质量 /kg | 重物上升距离 /m | 弹簧测力计的示数/N | 拉力作用点移动距离/m | 滑轮组机械 效率 |
| 1 | 0.1 | 0.1 | 0.6 | 0.3 | |
| 2 | 0.2 | 0.1 | 0.9 | 0.3 | 74.1% |
| 3 | 0.3 | 0.1 | 1.1 | 0.3 | 90.9% |
①根据表中的数据,计算出第一次实验中的机械效率:______.(取g=10N/kg)
②从上述实验数据可得出,机械效率与物重的定性关系为:______.
③请你就如何提高滑轮组的机械效率提出自己的建议.(只需提1条)______.
某同学做“研究杠杆平衡条件”的实验时,得到的两组数据如表中所示.
实验序号 | 动力F1/N | 动力臂L1/ m | 阻力F2/N | 阻力臂L2/ m |
1 | 1 | 0.08 | 2 | 0.04 |
2 | 2 | 0.2 | 1 | 0.1 |

这两组数据中肯定序号为____的一组有错误.如果他的操作没有错,砝码重及力臂值也没有错,那么产生此组数据错误的原因是_______________.
如图所示,想使杠杆在水平位置平衡,以便测量力臂,她可以采取的做法是:
(写出一条即可);
(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使
______;小明用如图所示的装置验证杠杆的平衡条件,调节右边钩码的个数和悬挂位置,使杠杆水平平衡时,读出弹簧测力计的示数F1=1.1N,钩码对杠杆的拉力F2=1.47N,测得支点O到这两个作用点的距离L1=20cm,L2=10cm,他将所得数据直接代入杠杆平衡条件的公式中,发现F1?L1和F2?L2并不相等,从而认为杠杆的平衡条件不一定是F1?L1=F2?L2,小明的失误地方是______.
(2)交流与评估是科学探究中的一个重要环节.在探究滑轮组机械效率与物重关系的实验中,小明和小峰用同一滑轮组装置做了三次实验,测得的有关数据如下表所示.
他俩与其它小组的同学进行了交流.请你对表中的实验数据进行分析比较,回答下列问题:
①根据表中的数据,计算出第一次实验中的机械效率:______.(取g=10N/kg)
②从上述实验数据可得出,机械效率与物重的定性关系为:______.
③请你就如何提高滑轮组的机械效率提出自己的建议.(只需提1条)______.

______;小明用如图所示的装置验证杠杆的平衡条件,调节右边钩码的个数和悬挂位置,使杠杆水平平衡时,读出弹簧测力计的示数F1=1.1N,钩码对杠杆的拉力F2=1.47N,测得支点O到这两个作用点的距离L1=20cm,L2=10cm,他将所得数据直接代入杠杆平衡条件的公式中,发现F1?L1和F2?L2并不相等,从而认为杠杆的平衡条件不一定是F1?L1=F2?L2,小明的失误地方是______.
(2)交流与评估是科学探究中的一个重要环节.在探究滑轮组机械效率与物重关系的实验中,小明和小峰用同一滑轮组装置做了三次实验,测得的有关数据如下表所示.
| 实验次数 | 重物质量 /kg | 重物上升距离 /m | 弹簧测力计的示数/N | 拉力作用点移动距离/m | 滑轮组机械 效率 |
| 1 | 0.1 | 0.1 | 0.6 | 0.3 | |
| 2 | 0.2 | 0.1 | 0.9 | 0.3 | 74.1% |
| 3 | 0.3 | 0.1 | 1.1 | 0.3 | 90.9% |
①根据表中的数据,计算出第一次实验中的机械效率:______.(取g=10N/kg)
②从上述实验数据可得出,机械效率与物重的定性关系为:______.
③请你就如何提高滑轮组的机械效率提出自己的建议.(只需提1条)______.