题目内容
12.在海滩案发现场留下了罪犯清晰的站立脚印,公安人员立即用蜡浇了一只鞋模,测得鞋模的平均厚度为3cm,质量为675g,又经测试达到脚印同样深度的压强为1.5×104Pa.罪犯质量是多少kg?(蜡的密度ρ蜡=0.9×103kg/m3)分析 根据V=$\frac{m}{ρ}$求出鞋模体积,进一步求出鞋模面积,罪犯站立时的面积是鞋模面积的2倍,又因为罪犯对地面的压力来自于自己的体重,根据F=pS求出压力即为罪犯的体重.
解答 解:由ρ=$\frac{m}{V}$可得,鞋模体积:
V=$\frac{m}{ρ}$=$\frac{675×1{0}^{-3}kg}{0.9×1{0}^{3}kg/{m}^{3}}$=0.75×10-3m3,
鞋模面积:
S1=$\frac{V}{h}$=$\frac{0.75×1{0}^{-3}{m}^{3}}{3×1{0}^{-2}m}$=2.5×10-2m2,
双脚站立时的受力面积:S=2S1=5×10-2m2,
因水平面上物体的压力和自身的重力相等,
所以,由p=$\frac{F}{S}$可得,罪犯的体重:G=F=pS=1.2×104Pa×5×10-2m2=600N;
由G=mg可知罪犯的质量:m=$\frac{G}{g}$=$\frac{600N}{10N/kg}$=60kg.
答:罪犯的质量为60kg.
点评 本题考查了密度公式、体积公式和压强公式的应用,关键是知道水平面上物体的压力和自身的重力相等,计算过程要注意单位的换算.

练习册系列答案
相关题目

 (1)A密度.
(1)A密度.
4.小李骑自行车上坡时,若速度越来越慢,则车和人的( )
| A. | 动能变大,重力势能变小 | B. | 动能变小,重力势能变小 | ||
| C. | 动能不变,重力势能不变 | D. | 动能变小,重力势能变大 |
7.小新利用如图1所示的装置探究摩擦力跟压力大小的关系.

(1)实验时,他拉动木块在水平木板上做匀速直线运动,弹簧测力计的示数就等于摩擦力的大小,请你帮小新作出证明.
(2)某次实验中弹簧测力计的指针位置如图1所示,它的示数是1.6N.
(3)改变木块上所加钩码的个数进行多次实验,记录的数据如表所示,请根据表中的数据,在坐标图中画出摩擦力随压力大小变化的关系图象.
(4)分析图象可以得到的结论是:当接触面的粗糙程度一定时,摩擦力跟压力的大小成正比.
(5)实验结束后,小新同学想继续探究摩擦力是否与接触面的大小有关,他用弹簧测力计测出木块在水平面上做匀速直线运动时的摩擦力,然后将木块沿竖直方向锯掉一半,测得摩擦力的大小也变为原来的一半.他由此得出:当接触面的粗糙程度一定时,接触面越小,摩擦力越小.你认为他的结论正确吗?不正确,理由是:没有控制压力大小不变.
(1)实验时,他拉动木块在水平木板上做匀速直线运动,弹簧测力计的示数就等于摩擦力的大小,请你帮小新作出证明.
(2)某次实验中弹簧测力计的指针位置如图1所示,它的示数是1.6N.
(3)改变木块上所加钩码的个数进行多次实验,记录的数据如表所示,请根据表中的数据,在坐标图中画出摩擦力随压力大小变化的关系图象.
| 实验次数 | 1 | 2 | 3 | 4 | 5 |
| 压力F/N | 3 | 4 | 5 | 6 | 7 |
| 摩擦力?/N | 0.6 | 0.8 | 1.0 | 1.2 | 1.4 |
(5)实验结束后,小新同学想继续探究摩擦力是否与接触面的大小有关,他用弹簧测力计测出木块在水平面上做匀速直线运动时的摩擦力,然后将木块沿竖直方向锯掉一半,测得摩擦力的大小也变为原来的一半.他由此得出:当接触面的粗糙程度一定时,接触面越小,摩擦力越小.你认为他的结论正确吗?不正确,理由是:没有控制压力大小不变.
17.阅读短文,回答问题:
智能扫地机器人
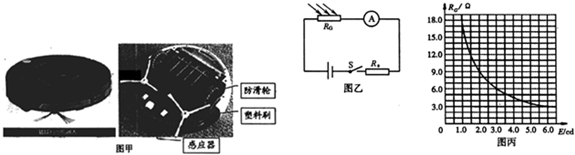
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差;风量指单位时间内通过吸尘电机排出的空气体积;吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)下列说法中错误的是B.
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
智能扫地机器人
智能扫地机器人是一款能自动清扫的家用电器,如图甲所示.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮上印有凸凹不平的花纹;底部安装有塑料刷,用于清扫吸附在地板或地毯上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.
表一:
| 额定工作电压 | 12V | 额定工作电流 | 2.5A |
| 电池容量 | 2000mAh | 行进速度 | 0.3m/s |
表二:
| 真空度/Pa | 400 | 450 | 500 | 550 | 600 |
| 风量/(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率/W | 10.00 | 9.00 | 8.50 | 8.25 | 7.80 |
A.机器人通过电动机旋转产生高速气流,以此来减小主机内部的气压而产生吸力.
B.在地毯纤维内掺杂金属丝,会增加机器人对灰尘及轻小物体的清扫难度
C.防滑轮上印有凸凹不平的花纹,是为了增大机器人与地面间的摩擦
D.当遇到黑色真皮沙发等深色障碍物时,使用超声波感应器效果较好
(2)若该机器人向障碍物垂直发射超声波,经过0.02s收到回波,则其发射超声波时与障碍物间的距离约为3.4m(此空答案保留一位小数);在这段时间内机器人向前行进的距离为0.006m.
(3)电池容量“2000mAh”是指当工作电流为2000mA,能持续供电1h.该机器人充满电后至下一次自动充电前能够连续正常工作的最长时间为0.64h.假设返回充电过程中受到的阻力为36N,剩余电池容量支持正常工作所能做的电功的20%用于克服阻力做功,为确保机器人能顺利返回充电,需要充电时离充电座最远为96 m.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,5min内通过吸尘电机提出的空气质量为5.85kg.(ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件,图乙为光敏电阻的控制电路,电源电压U恒定,空气中的灰尘浓度会影响空气透光程度,RG为光敏电阻,其阻值随光照射的强弱而改变.“光强”表示光的强弱程度的物理量,照射光越强,光强越大,光强符号用E表示,国际单位为坎德拉(cd).实验测得光敏电阻的阻值RG与光强E间的关系如图丙所示,R0为定值电阻.当光照强度为4.5cd时,电流表的读数为0.5A;当光照强度为1.5cd时,电流表的读数为0.3A,则R0=8Ω.为监测空气的透光程度,现将电流表表盘的电流I刻度值转化为对应的总阻值(R0+RG ),则转化后表盘上从左到右相邻两刻度线对应总阻值的差值将逐渐减小,原因是电流表的示数I与总阻值(R0+RG)成反比.
 如图所示,是探究电流通过导体产生热量的多少与哪些因素有关的实验装置.
如图所示,是探究电流通过导体产生热量的多少与哪些因素有关的实验装置.
1. 桔棉是古代一种取水的工具,如图是桔棉的原理图,则下列有关分析,不符合实际的是
桔棉是古代一种取水的工具,如图是桔棉的原理图,则下列有关分析,不符合实际的是
( )
桔棉是古代一种取水的工具,如图是桔棉的原理图,则下列有关分析,不符合实际的是( )
| A. | 取水时,向下用力拉绳子,石块重力势能增大 | |
| B. | 提水时,向上用力提绳子,水桶重力势能增加 | |
| C. | 取水时,桔棉为省力杠杆,提水时,桔棉为费力杠杆 | |
| D. | 提水时,若水桶上升过快,可用减小石块质量的方法来调节 |
 如图所示是投影手机,投影手机利用了凸透镜(选填“凸透镜”或“凹透镜”)成像的原理.光在屏幕上发生了漫反射(选填“镜面反射”或“漫反射”),使坐在各个方向的现众都能看见屏幕上的像,屏幕上的丰富色彩是由红、绿、蓝三种色光混合而成的.
如图所示是投影手机,投影手机利用了凸透镜(选填“凸透镜”或“凹透镜”)成像的原理.光在屏幕上发生了漫反射(选填“镜面反射”或“漫反射”),使坐在各个方向的现众都能看见屏幕上的像,屏幕上的丰富色彩是由红、绿、蓝三种色光混合而成的.