题目内容
(题文)甲、乙两个机器人检测零件,甲比乙每小时多检测20个,甲检测300个比乙检测200个所用的时间少,若设甲每小时检测个,则根据题意,可列出方程:__________.
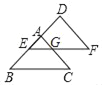
如图,△ABC≌△DEF,BC∥EF,AC∥DF,则∠C的对应角是( )
A. ∠F B. ∠AGF C. ∠AEF D. ∠D
(3xy2)2+(﹣4xy3)(﹣xy)=______.
抛物线y=ax2+bx+3(a≠0)经过点A(﹣1,0),B(,0),且与y轴相交于点C.
(1)求这条抛物线的表达式;
(2)求∠ACB的度数;
(3)设点D是所求抛物线第一象限上一点,且在对称轴的右侧,点E在线段AC上,且DE⊥AC,当△DCE与△AOC相似时,求点D的坐标.
在平面直角坐标系中,抛物线y=x2+x+2上有一动点P,直线y=﹣x﹣2上有一动线段AB,当P点坐标为_____时,△PAB的面积最小.
计算:
(1)()2=_____;
(2) =_____.
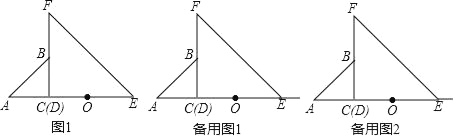
如图1,等腰Rt△ABC和等腰Rt△DEF中,∠BCA=∠FDE=90°,AB=4,EF=8.点A、C、D、E在一条直线上,等腰Rt△DEF静止不动,初始时刻,C与D重合,之后等腰Rt△ABC从C出发,沿射线CE方向以每秒1个单位长度的速度匀速运动,当A点与E点重合时,停止运动.设运动时间为t秒(t≥0).
(1)直接写出线段AC、DE的长度;
(2)在等腰Rt△ABC的运动过程中,设等腰Rt△ABC和等腰Rt△DEF重叠部分的面积为S,请直接写出S与t的函数关系式和相应的自变量t的取值范围;
(3)在整个运动过程中,当线段AB与线段EF相交时,设交点为点M,点O为线段CE的中点;是否存在这样的t,使点E、O、M三点构成的三角形是等腰三角形?若存在,求出对应的t的值;若不存在,请说明理由.
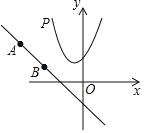
一次函数y=mx+n的图象如图所示,则方程mx+n=0的解为( )
A. x=2 B. y=2 C. x=-3 D. y=-3
已知二次函数y=﹣2x2﹣4x+6.
(1)求出函数的顶点坐标、对称轴以及描述该函数的增减性.
(2)求抛物线与x轴交点和y轴交点坐标;并画出它的大致图象.
(3)当﹣2<x<4时.求函数y的取值范围.



 ,0),且与y轴相交于点C.
,0),且与y轴相交于点C.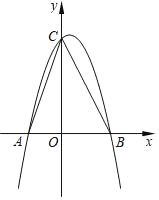
 )2=_____;
)2=_____;
 =_____.
=_____. ,EF=8
,EF=8