题目内容
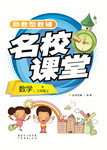
在一次机器人测试中,要求机器人从A出发到达B处.如图(1),已知点A在O的正西方600cm处,B在O的正北方300cm处,且机器人在射线AO及其右侧(AO下方)区域的速度为20cm/秒,在射线AO的左侧(AO上方)区域的速度为10cm/秒。
(1)分别求机器人沿A→O→B路线和沿A→B路线到达B处所用的时间(精确到秒);
(2)若∠OCB=45°,求机器人沿A→C→B路线到达B处所用的时间(精确到秒);
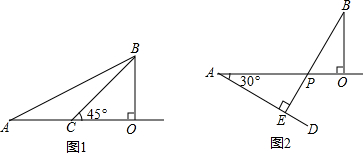
(3)如图(2),作∠OAD=30°,再作BE⊥AD于E,交OA于P,试说明:从A出发到达B处,机器人沿A→P→B路线行进所用时间最短。(参考数据: ≈1.414,
≈1.414, ≈1.732,
≈1.732, ≈2.236,
≈2.236, ≈2.449)
≈2.449)
(1)分别求机器人沿A→O→B路线和沿A→B路线到达B处所用的时间(精确到秒);
(2)若∠OCB=45°,求机器人沿A→C→B路线到达B处所用的时间(精确到秒);
(3)如图(2),作∠OAD=30°,再作BE⊥AD于E,交OA于P,试说明:从A出发到达B处,机器人沿A→P→B路线行进所用时间最短。(参考数据:
≈1.414,≈1.732,≈2.236,≈2.449) 
(1) (2)
解:(1)沿A→O→B路线行进所用时间为:600÷20+300÷10=60(秒),
在Rt△OBA中,由勾股定理,得AB= =300
=300 (cm),
(cm),
∴沿A→B路线行进所用时间为:300÷10≈300×2.236÷10≈67(秒);
(2)在Rt△OBC中,OB=300,∠OCB=45°,
∴OC= OB=300cm,BC= =300
=300 (cm),
(cm),
∴AC=600-300=300(cm),
∴沿A→C→B路线行进所用时间为:
AC÷20+BC÷10=300÷20+300 ÷10≈15+42.42≈57(秒);
÷10≈15+42.42≈57(秒);
(3)在AO上任取异于点P的一点P′,作P′E′⊥AD于E′,连结P′B,
在Rt△APE和Rt△AP′E′中,sin30°= ,
,
∴EP= ,E′P′=
,E′P′= ,
,
∴沿A→P→B路线行进所用时间为:AP÷20+PB÷10= EP÷10+PB÷10=(EP+PB)÷10= BE(秒),
BE(秒),
沿A→P′→B路线行进所用时间为:AP′÷20+P′B÷10= E′P′÷10+P′B÷10=(E′P′+P′B)÷10=  (E′P′+P′B)(秒),
(E′P′+P′B)(秒),
连结BE′,则E′P′+P′B > BE′>BE,
∴ BE <
BE < (E′P′+P′B),
(E′P′+P′B),
∴沿A→P→B路线行进所用时间,小于沿A→P′→B路线行进所用时间,
即机器人沿A→P→B路线行进所用时间最短。

练习册系列答案
 名校课堂系列答案
名校课堂系列答案
相关题目

 ≈1.414,
≈1.414, ≈1.732,
≈1.732, ≈2.236,
≈2.236, ≈2.449)
≈2.449)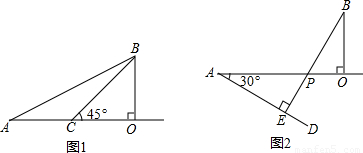
 ≈1.414,
≈1.414, ≈1.732,
≈1.732, ≈2.236,
≈2.236, ≈2.449)
≈2.449)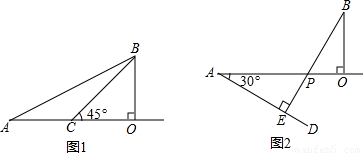
 ≈1.414,
≈1.414, ≈1.732,
≈1.732, ≈2.236,
≈2.236, ≈2.449)
≈2.449)