题目内容
下列运算正确的是( )
A.(a2)3=a5 B.(ab)2=ab2 C.a6÷a3=a2 D.a2•a3=a5
(1);
(2).
将抛物线向右平移个单位,再向上平移个单位,所得抛物线相应的函数表达式是
A. B. C. D.
若反比例函数y=的图象经过点(﹣1,﹣2),则k的值为 .
对于命题“若a2>b2,则a>b”,下面四组关于a,b的值中,能说明这个命题是假命题的是( )
A.a=3,b=2 B.a=﹣3,b=2 C.a=3,b=﹣1 D.a=﹣1,b=3
某校机器人兴趣小组在如图①所示的矩形场地上开展训练.机器人从点出发,在矩形边上沿着的方向匀速移动,到达点时停止移动.已知机器人的速度为个单位长度/,移动至拐角处调整方向需要(即在、处拐弯时分别用时).设机器人所用时间为时,其所在位置用点表示,到对角线的距离(即垂线段的长)为个单位长度,其中与的函数图像如图②所示.
(1)求、的长;
(2)如图②,点、分别在线段、上,线段平行于横轴,、的横坐标分别为、.设机器人用了到达点处,用了到达点处(见图①).若,求、的值.
计算:.
有一组数据:,,,,,这组数据的平均数为
A. B. C. D.
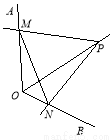
如图,点P为定角∠AOB的平分线上的一个定点,且∠MPN与∠AOB互补.若∠MPN在绕点P旋转的过程中,其两边分别与OA,OB相交于M、N两点,则以下结论:(1)PM=PN恒成立,(2)OM+ON的值不变,(3)四边形PMON的面积不变,(4)MN的长不变,其中正确的个数为
A.4 B.3 C.2 D.1


 开心蛙状元测试卷系列答案开心蛙状元测试卷系列答案
开心蛙状元测试卷系列答案开心蛙状元测试卷系列答案 ;
; .
. 向右平移
向右平移 个单位,再向上平移
个单位,再向上平移 个单位,所得抛物线相应的函数表达式是
个单位,所得抛物线相应的函数表达式是 B.
B. C.
C. D.
D.
 的图象经过点(﹣1,﹣2),则k的值为 .
的图象经过点(﹣1,﹣2),则k的值为 . 出发,在矩形
出发,在矩形 边上沿着
边上沿着 的方向匀速移动,到达点
的方向匀速移动,到达点 时停止移动.已知机器人的速度为
时停止移动.已知机器人的速度为 个单位长度/
个单位长度/ ,移动至拐角处调整方向需要
,移动至拐角处调整方向需要
 (即在
(即在 、
、 处拐弯时分别用时
处拐弯时分别用时
 ).设机器人所用时间为
).设机器人所用时间为 时,其所在位置用点
时,其所在位置用点 表示,
表示, 到对角线
到对角线 的距离(即垂线段
的距离(即垂线段 的长)为
的长)为 个单位长度,其中
个单位长度,其中 与
与 的函数图像如图②所示.
的函数图像如图②所示. 、
、 的长;
的长; 、
、 分别在线段
分别在线段 、
、 上,线段
上,线段 平行于横轴,
平行于横轴, 、
、 的横坐标分别为
的横坐标分别为 、
、 .设机器人用了
.设机器人用了 到达点
到达点 处,用了
处,用了 到达点
到达点 处(见图①).若
处(见图①).若 ,求
,求 、
、 的值.
的值.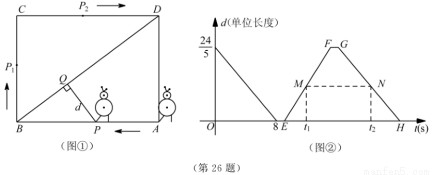
 .
. ,
, ,
, ,
, ,
, ,这组数据的平均数为
,这组数据的平均数为 B.
B. C.
C. D.
D.