摘要:22.根据指令[s.A](s≥0.0°<A<180°.机器人在平面上能完成下列动作:先在原地逆时针旋转角度A.再朝其面对的方向沿直线行走距离s.现机器人在平面直角坐标系的坐标原点.且面对轴正方向.(1)若给机器人下了一个指令[4.30°].则机器人应移到点 ,
网址:http://m.1010jiajiao.com/timu_id_774403[举报]
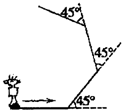 15、某科技小组制作了一个机器人,它能根据指令要求进行行走和旋转.某一指令规定:机器人先向前行走1米,然后左转45°,若机器人反复执行这一指令,则从出发到第一次回到原处,机器人共走了
15、某科技小组制作了一个机器人,它能根据指令要求进行行走和旋转.某一指令规定:机器人先向前行走1米,然后左转45°,若机器人反复执行这一指令,则从出发到第一次回到原处,机器人共走了8
米.
根据指令[S,Q],(S≥0,0<Q<180°),机器人在平面上能完成下列动作:先原地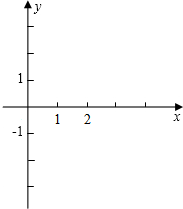 逆时针旋转角度Q,再朝其面对的方向沿直线行走距离S.现在机器人在直角坐标系的坐标原点,且面对x轴正方向.
逆时针旋转角度Q,再朝其面对的方向沿直线行走距离S.现在机器人在直角坐标系的坐标原点,且面对x轴正方向.
问:(1)若给机器人下了一个指令[ ],机器人移动到点A(1,1);
(2)若机器人在A点的位置,给机器人下达[2
,90°]的指令后,机器人移动到点B( );
(3)若机器人从B点出发,移动到x轴上一点P,再继续移动到A点,要使移动的距离最短,求P点坐标. 查看习题详情和答案>>
逆时针旋转角度Q,再朝其面对的方向沿直线行走距离S.现在机器人在直角坐标系的坐标原点,且面对x轴正方向.问:(1)若给机器人下了一个指令[
(2)若机器人在A点的位置,给机器人下达[2
| 2 |
(3)若机器人从B点出发,移动到x轴上一点P,再继续移动到A点,要使移动的距离最短,求P点坐标. 查看习题详情和答案>>
随着科学技术的发展,机器人早已能按照设计的指令完成各种动作.在坐标平面上,根据指令[S,α](S≥0,0°<α<180°)机器人能完成下列动作:先原地顺时针旋转角度α,再朝其对面方向沿直线行走距离s.
(1)填空:如图,若机器人在直角坐标系的原点,且面对y轴的正方向,现要使其移动到点A(2,2),则给机器人发出的指令应是 ;
(2)机器人在完成上述指令后,发现在P(6,0)处有一小球正向坐标原点做匀速直线运动,已知小球滚动的速度与机器人行走的速度相同,若忽略机器人原地旋转的时间,请你给机器人发一个指令,使它能截住小球.
(参考数据:sin53°≈0.8,cos37°≈0.80,tan37°≈0.75,tan26.5°≈0.5)
 查看习题详情和答案>>
查看习题详情和答案>>
(1)填空:如图,若机器人在直角坐标系的原点,且面对y轴的正方向,现要使其移动到点A(2,2),则给机器人发出的指令应是
(2)机器人在完成上述指令后,发现在P(6,0)处有一小球正向坐标原点做匀速直线运动,已知小球滚动的速度与机器人行走的速度相同,若忽略机器人原地旋转的时间,请你给机器人发一个指令,使它能截住小球.
(参考数据:sin53°≈0.8,cos37°≈0.80,tan37°≈0.75,tan26.5°≈0.5)
查看习题详情和答案>>