摘要:.-------------------- 解得θ=30°.----------------------
网址:http://m.1010jiajiao.com/timu_id_494871[举报]
如图,质量为m=60 g的钢棒长为S=20 cm,棒两端与长为L=30 cm的细软铜线相连,吊在磁感应强度为B=0.5 T、竖直向上的匀强磁场中,当棒中通过稳恒电流I后,钢棒向上摆动,最大偏角![]() =60°,g取10 m/s2.
=60°,g取10 m/s2.

求:钢棒中电流I的大小.
以下是某同学的解答:钢棒在最高点受到三个力的作用:拉力T,安培力F,重力mg.
对这些力进行正交分解,由于棒在![]() =60°时处于平衡状态,有:
=60°时处于平衡状态,有:
在水平方向上:Tsin60°=F ①
在竖直方向上:Tcos60°=mg ②
而:F=BIS ③
由①②③可求出钢棒中的电流I.
请问:该同学所得结论是否正确?
若正确,请代入已知量求出结果.
若有错误,请分析错误原因并求出正确结果.
 如图所示,粗细均匀的玻璃管,当温度为27℃时,封闭在管内的空气柱AB长为30cm,BC长为10cm,管内水银柱水平部分CD长为18cm,竖直部分DE长为15cm,外界大气压强为75cmHg,问:要使水平管内没有水银柱,温度至少要升高到多少℃?
如图所示,粗细均匀的玻璃管,当温度为27℃时,封闭在管内的空气柱AB长为30cm,BC长为10cm,管内水银柱水平部分CD长为18cm,竖直部分DE长为15cm,外界大气压强为75cmHg,问:要使水平管内没有水银柱,温度至少要升高到多少℃?现有某同学的解法如下:
以ABC管中的气体为研究对象,各状态参量如下:p1=(75-15)cmHg=60cmHgV1=(30+10)cm?S=40cm?S(式中S为玻璃管的横截面)T1=300K.要使水平管内没有水银柱,则气体膨胀到D处,这时气体的状态参量如下:p2=(75-15-18)cmHg=42cmHgV2=(30+10+18)cm?S=58cm?S(式中S为玻璃管的横截面)T2=?
因为
| p1V1 |
| T1 |
| p2V2 |
| T2 |
所以要使水平管内没有水银柱,温度至少要升高到31.5℃
已知上述计算无误,请问该同学求得的结果是否正确?倘若有错,请求出正确结果.
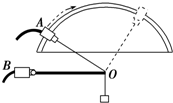 如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述实验步骤,得到表格.
| F1 | 1.001 | 0.580 | … | 1.002 | … |
| F2 | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |
F1
F1
(选填“F1”或“F2”).钩码质量为0.05
0.05
kg(保留一位有效数字).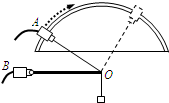 如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂在一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述①②③④,得到图示表格a.
(1)根据表格a,A传感器对应的是表中力
F1
F1
(填“F1”或“F2”).钩码质量为0.05
0.05
kg(保留1位有效数字).| F1 | 1.001 | 0.580 | … | 1.002 | … |
| F2 | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |
C
C
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差.
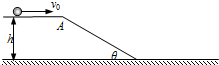 如图所示,一高度为h=0.2m的水平面在A点处与一倾角为θ=30°的斜面连接,一小球以v0=5m/s的速度在水平面上向右运动.求小球从A点运动到地面所需的时间(平面与斜面均光滑.g取10m/s2).某同学对此题的解法为:小球沿斜面运动,则
如图所示,一高度为h=0.2m的水平面在A点处与一倾角为θ=30°的斜面连接,一小球以v0=5m/s的速度在水平面上向右运动.求小球从A点运动到地面所需的时间(平面与斜面均光滑.g取10m/s2).某同学对此题的解法为:小球沿斜面运动,则