摘要:器材: (1)DIS“模块机器人 及配套软件.多媒体计算机及大屏幕投影. (2)其他所需器材.
网址:http://m.1010jiajiao.com/timu_id_4417336[举报]
 (1)利用图中所示的装置可以研究自由落体运动.实验中需要调整好仪器,接通打点计时器的电源,松开纸带,使重物下落.打点计时器会在纸带上打出一系列的小点.
(1)利用图中所示的装置可以研究自由落体运动.实验中需要调整好仪器,接通打点计时器的电源,松开纸带,使重物下落.打点计时器会在纸带上打出一系列的小点.①为了测试重物下落的加速度,还需要的实验器材有
C
C
.( 填入正确选项前的字母)A.天平 B.秒表 C.米尺
②若实验中所得到的重物下落的加速度值小于当地的重力加速度值,而实验操作与数据处理均无错误,写出一个你认为可能引起此误差的原因:
纸带与打点计时器之间存在摩擦
纸带与打点计时器之间存在摩擦
.(2)“用DIS测变速直线运动的瞬时速度”实验中,使用光电门传感器.小王同学利用DIS实验器材研究某物体沿X轴运动的规律,发现物体所处的坐标X与时间t满足X=t3-2t(单位均是SI制单位),则该物体在第2秒末的瞬时速度大小为
10
10
m/s.“用DIS研究温度不变时,一定质量的气体压强与体积的关系”的实验中
(1)所需的实验器材为:数据采集器、计算机、 和 .
(2)(单选题)若在输入体积值时未加上软管的体积,则实验结果的p-V图线可能为 (图中实线是实验所得图线,虚线为一根参考双曲线)

查看习题详情和答案>>
(1)所需的实验器材为:数据采集器、计算机、
(2)(单选题)若在输入体积值时未加上软管的体积,则实验结果的p-V图线可能为
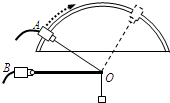 如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂在一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述①②③④,得到图示表格a.
(1)根据表格a,A传感器对应的是表中力
(2)(单选题)本实验中多次对传感器进行调零,对此操作说明正确的是
| A.因为事先忘记调零 | B.何时调零对实验结果没有影响 |
| C.为了消除横杆自身重力对结果的影响 | D.可以完全消除实验的误差 |
表格a
| F1 | 1.001 | 0.580 | … | 1.002 | … |
| F2 | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |
| F1 | 1.103 | … | |
| F2 | … | … | … |
| θ | 30° | 60° | … |
(1)如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
①在该实验中必须采用控制变量法,应保持 不变,用钩码所受的重力作为 ,用DIS测小车的加速度.
②改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图2所示).
a.分析此图线的OA段可得出的实验结论是 .
b.(单选题)此图线的AB段明显偏离直线,造成此误差的主要原因是
(A)小车与轨道之间存在摩擦(B)导轨保持了水平状态
(C)所挂钩码的总质量太大(D)所用小车的质量太大
(2)用图3所示的电路,测定一节干电池的电动势和内阻.电池的内阻较小,为了防止在调节滑动变阻器时造成短路,电路中用一个定值电阻R0起保护作用.除电池、开关和导线外,可供使用的实验器材还有:
(1)电流表(量程0.6A、3A);
(2)电压表(量程3V、15V)
(3)定值电阻(阻值1Ω(4)、额定功率5W)
(5)定值电阻(阻值10Ω(6),额定功率10W)
(7)滑动变阻器(阴值范围0--10Ω(8)、额定电流2A)
(9)滑动变阻器(阻值范围0-100Ω(10)、额定电流1A)
那么a.要正确完成实验,电压表的量程应选择 V,电流表的量程应选择 A;R0应选择 Ω的定值电阻,R应选择阻值范围是 Ω的滑动变阻器.
b.引起该实验系统误差的主要原因是 .

查看习题详情和答案>>
①在该实验中必须采用控制变量法,应保持
②改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图2所示).
a.分析此图线的OA段可得出的实验结论是
b.(单选题)此图线的AB段明显偏离直线,造成此误差的主要原因是
(A)小车与轨道之间存在摩擦(B)导轨保持了水平状态
(C)所挂钩码的总质量太大(D)所用小车的质量太大
(2)用图3所示的电路,测定一节干电池的电动势和内阻.电池的内阻较小,为了防止在调节滑动变阻器时造成短路,电路中用一个定值电阻R0起保护作用.除电池、开关和导线外,可供使用的实验器材还有:
(1)电流表(量程0.6A、3A);
(2)电压表(量程3V、15V)
(3)定值电阻(阻值1Ω(4)、额定功率5W)
(5)定值电阻(阻值10Ω(6),额定功率10W)
(7)滑动变阻器(阴值范围0--10Ω(8)、额定电流2A)
(9)滑动变阻器(阻值范围0-100Ω(10)、额定电流1A)
那么a.要正确完成实验,电压表的量程应选择
b.引起该实验系统误差的主要原因是
 (1)(单选题)用细线将一块玻璃片水平地悬挂在弹簧测力计的下端,并使玻璃片贴在水面上,如图所示,然后用手缓慢提起弹簧测力计,在使玻璓片脱离水面的一瞬间,关于弹簧测力计的示数下列说法中正确的是
(1)(单选题)用细线将一块玻璃片水平地悬挂在弹簧测力计的下端,并使玻璃片贴在水面上,如图所示,然后用手缓慢提起弹簧测力计,在使玻璓片脱离水面的一瞬间,关于弹簧测力计的示数下列说法中正确的是D
D
A.弹簧测力计的示数等于玻璃片的重力
B.弹簧测力计的示数小于玻璃片的重力,因为玻璃片受到水的支持力
C.弹簧测力计的示数小于玻璃片的重力,因为玻璃片受到水的浮力
D.弹簧测力计的示数大于玻璃片的重力,因为玻璃片受到水的分子力
(2).DIS实验是利用现代信息技术进行的实验.学生实验“用DIS研究机械能守恒定律”的装置如图(a)所示,小球起到挡光片的作用,传感器K是光电门传感器.
某组同学在一次实验中,选择DIS以图象方式显示实验的结果,所显示的图象如图(b)所示.图象的横轴表示小球距D点的高度h,纵轴表示摆球的重力势能EP、动能Ek或机械能E.试回答下列问题:
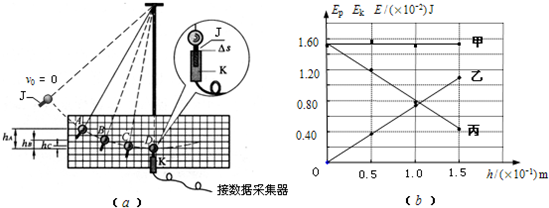
①图(b)的图象中,表示小球的重力势能EP、动能Ek、机械能E随小球距D点的高度h变化关系的图线分别是
乙、丙、甲
乙、丙、甲
(按顺序填写相应图线所对应的文字).②根据图(b)所示的实验图象,可以得出的结论是
在误差允许的范围内,在只有重力做功的情况下,小球的机械能守恒
在误差允许的范围内,在只有重力做功的情况下,小球的机械能守恒
.(3)如图为某一小灯泡的U-I关系曲线图.
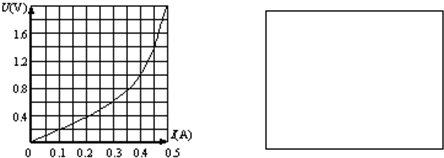
①为了通过测量得到图示U-I关系的完整曲线,请在右框中画出实验电路图.可用的器材有:电压表、电流表、滑线变阻器(变化范围0-10Ω)、电源、小灯泡、电键、导线若干.
②将这个小灯泡接到电池两端,已知电池的电动势是1.5V,内阻是2.0Ω.问:小灯泡的实际功率是多少?
0.28W
0.28W
.