题目内容
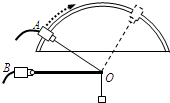 如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂在一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述①②③④,得到图示表格a.
(1)根据表格a,A传感器对应的是表中力
(2)(单选题)本实验中多次对传感器进行调零,对此操作说明正确的是
| A.因为事先忘记调零 | B.何时调零对实验结果没有影响 |
| C.为了消除横杆自身重力对结果的影响 | D.可以完全消除实验的误差 |
表格a
| F1 | 1.001 | 0.580 | … | 1.002 | … |
| F2 | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |
| F1 | 1.103 | … | |
| F2 | … | … | … |
| θ | 30° | 60° | … |
分析:(1)传感器在受到拉力时读数为正,受到压力时读数为负,A传感器读数为正,故为拉力,相当于F1,由节点O受力平衡,结合θ读数,可得钩码质量
(2)横杆自身重力会对实验结果造成影响,故应多次调零
(3)设杆的自重为G,利用θ的两个数值,结合钩码重力列方程解决问题
(2)横杆自身重力会对实验结果造成影响,故应多次调零
(3)设杆的自重为G,利用θ的两个数值,结合钩码重力列方程解决问题
解答:解:(1)传感器在受到拉力时读数为正,A传感器读数为正,故为拉力,相当于F1;当θ=30°时,由节点O受力平衡可得,竖直方向F1sin30°=mg
故,m=
kg=0.05kg
(2)横杆自身重力会对实验结果造成影响,故应多次调零,故选C
(3)设杆自重为G,由节点O受力平衡可得:
(1.103-G)sin30°=0.05×10
(F′1-G)sin60°=0.05×10
解得:F′1=0.637N
故答案为:(1)F1,0.05 (2)C (3)0.637(0.630~0.645之间均可)
故,m=
1.001×
| ||
| 10 |
(2)横杆自身重力会对实验结果造成影响,故应多次调零,故选C
(3)设杆自重为G,由节点O受力平衡可得:
(1.103-G)sin30°=0.05×10
(F′1-G)sin60°=0.05×10
解得:F′1=0.637N
故答案为:(1)F1,0.05 (2)C (3)0.637(0.630~0.645之间均可)
点评:解题的关键是首先根据题意灵活选取研究对象,然后再进行受力分析,列出方程求解即可

练习册系列答案
 开心蛙状元测试卷系列答案
开心蛙状元测试卷系列答案
相关题目
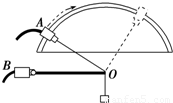
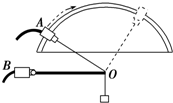 如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作: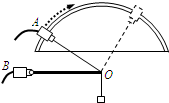 如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述实验步骤,得到表格.
根据表格A传感器对应的是表中力 (选填“F1”或“F2”).钩码质量为 kg(保留一位有效数字).
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述实验步骤,得到表格.
| F1 | 1.001 | 0.580 | … | 1.002 | … |
| F2 | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |