摘要:15.某实验小组利用拉力传感器和速度传感器探究“动能原理 .如图.他们将拉力传感器固定在小车上.用不可伸长的细线将其通过一个定滑轮与钩码相连.用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A.B两点各安装一个速度传感器.记录小车通过A.B时的速度大小.小车中可以放置砝码.
网址:http://m.1010jiajiao.com/timu_id_1126985[举报]
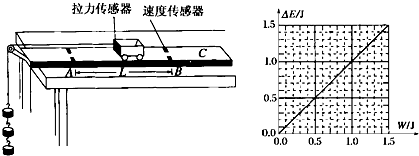
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小;
可以通过在小车上放置砝码来改变小车的质量,通过加减钩码的数量来改变拉力的大小.

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连,正确地连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,记录
③改变小车的质量或改变所挂钩码的数量,重复②的操作.
(2)表格中是他们测得的一组数据,其中M是M1与小车中砝码质量之和,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表中的△E3=
(3)根据表格中的数据,请在图2所示方格纸上作出△E-W图线.
实验数据记录表格.
查看习题详情和答案>>
可以通过在小车上放置砝码来改变小车的质量,通过加减钩码的数量来改变拉力的大小.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连,正确地连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,记录
细线拉力(或力传感器的示数)
细线拉力(或力传感器的示数)
及小车通过A、B时的速度;③改变小车的质量或改变所挂钩码的数量,重复②的操作.
(2)表格中是他们测得的一组数据,其中M是M1与小车中砝码质量之和,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表中的△E3=
0.600
0.600
J,W3=0.610
0.610
J(结果保留三位有效数字).(3)根据表格中的数据,请在图2所示方格纸上作出△E-W图线.
实验数据记录表格.
| 次数 | M/kg | |v12-v22|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连,正确连接所需电路
②将小车停在C点,然后释放小车,小车在细线拉动下运动,记录
A
A
A.细线拉力及小车通过A、B时的速度
B.钩码的质量和小车的质量
C、钩码的质量及小车通过A、B时的速度
D、小车的质量和细线的长度
③在小车中增加砝码,或减少砝码,重复②的操作.
(2)表1是他们测得的一组数据,其中M是M1与小车中砝码质量m之和,|v22-v21|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所作的功.表格中△E3=
0.600
0.600
,W3=0.610
0.610
.(结果保留三位有效数字)表1 数据记录表
| 次数 | M/kg | |v22-v21|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或
(2)下表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,|
-v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的△E3=
(3)根据表,我们在图中的方格纸上作出△E-W图线如图所示,它说明了
查看习题详情和答案>>
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或
改变钩码数量
改变钩码数量
,重复②的操作.(2)下表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,|
| v | 2 2 |
0.600
0.600
,W3=0.610
0.610
.(结果保留三位有效数字)| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
拉力(合力)所做的功近似等于物体动能的改变量
拉力(合力)所做的功近似等于物体动能的改变量
. 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
①测量
小车、砝码
小车、砝码
和拉力传感器的总质量M1;把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连;正确连接所需电路;②将小车停在C点,
由静止开始释放
由静止开始释放
,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.③在小车中增加砝码,或
减少砝码
减少砝码
,重复②的操作.(2)表1是他们测得的一组数据,其中M是M1与小车中砝码质量m之和,|v22-v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所作的功.表格中△E3=
0.600
0.600
,W3=0.610
0.610
.(结果保留三位有效数字)数据记录表
| 次数 | M/kg | |v22-v21|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
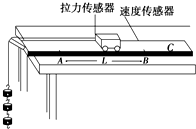 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距L的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距L的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
①按要求平衡摩擦力,测量
小车、砝码
小车、砝码
和拉力传感器的总质量M1;把细线的一端固定在拉力传感器上另一端通过定滑轮与钩码相连;正确连接所需电路;②将小车停在C点,接通电源后释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或
减少钩码数量
减少钩码数量
,重复②的操作.(2)处理实验数据时,设M是M1与小车中砝码质量m之和,|v22-v21|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E=
| 1 |
| 2 |
| 1 |
| 2 |
FL
FL
.