摘要: 在平面直角坐标系中有一点P0(1.0).O为坐标原点.将线段OPO绕点O按逆时针旋转45º得线段OP1.延长OP1到点P2.使OP2= 2OP1.再将OP2绕点O按逆时针方向旋转45º得线段OP3 .延长OP3到点P4.使OP4= 2OP3.照此规律.继续下去.试写出P2.P7.P100三个点的坐标.
网址:http://m.1010jiajiao.com/timu3_id_439569[举报]
 对于平面直角坐标系中的任意两点P1(x1,y1),P2(x2,y2),我们把|x1-x2|+|y1-y2|叫做P1、P2两点间的直角距离,记作d(P1,P2).
对于平面直角坐标系中的任意两点P1(x1,y1),P2(x2,y2),我们把|x1-x2|+|y1-y2|叫做P1、P2两点间的直角距离,记作d(P1,P2).
(1)已知O为坐标原点,动点P(x,y)满足d(O,P)=1,请写出x与y之间满足的关系式,并在所给的直角坐标系中画出所有符合条件的点P所组成的图形;
(2)设P0(x0,y0)是一定点,Q(x,y)是直线y=ax+b上的动点,我们把d(P0,Q)的最小值叫做P0到直线y=ax+b的直角距离.试求点M(2,1)到直线y=x+2的直角距离.
查看习题详情和答案>>
对于平面直角坐标系中的任意两点P1(x1,y1),P2(x2,y2),我们把|x1-x2|+|y1-y2|叫做P1、P2两点间的直角距离,记作d(P1,P2).
(1)已知O为坐标原点,动点P(x,y)满足d(O,P)=1,请写出x与y之间满足的关系式,并在所给的直角坐标系中画出所有符合条件的点P所组成的图形;
(2)设P0(x0,y0)是一定点,Q(x,y)是直线y=ax+b上的动点,我们把d(P0,Q)的最小值叫做P0到直线y=ax+b的直角距离.试求点M(2,1)到直线y=x+2的直角距离.
 (2012•无锡)对于平面直角坐标系中的任意两点P1(x1,y1),P2(x2,y2),我们把|x1-x2|+|y1-y2|叫做P1、P2两点间的直角距离,记作d(P1,P2).
(2012•无锡)对于平面直角坐标系中的任意两点P1(x1,y1),P2(x2,y2),我们把|x1-x2|+|y1-y2|叫做P1、P2两点间的直角距离,记作d(P1,P2).(1)已知O为坐标原点,动点P(x,y)满足d(O,P)=1,请写出x与y之间满足的关系式,并在所给的直角坐标系中画出所有符合条件的点P所组成的图形;
(2)设P0(x0,y0)是一定点,Q(x,y)是直线y=ax+b上的动点,我们把d(P0,Q)的最小值叫做P0到直线y=ax+b的直角距离.试求点M(2,1)到直线y=x+2的直角距离.
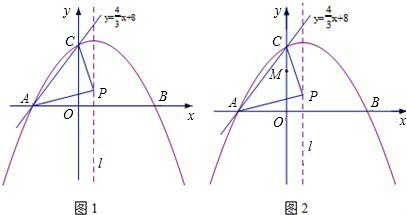
如图,在平面直角坐标系中,直线AC:y=
x+8与x轴交于点A,与y轴交于点C,抛物线y=ax2+bx+c过点A、点C,且与x轴的另一交点为B(10,0),又点P是抛物线的对称轴上一动点.
(1)求点A的坐标、抛物线的解析式及顶点N的坐标;
(2)在图1中的上找一点P0,使P0到点A与点C的距离之和最小;并求△PAC周长的最小值;
(3)如图2,在线段CO上有一动点M以每秒2个单位的速度从点C向点O移动(M不与端点C、O重合),过点M作MH∥CB交x轴于点H,设M移动的时间为秒,试把△P0HM的面积S表示成时间的函数,当为何值时,S有最大值,并求出最大值.
查看习题详情和答案>>
| 4 | 3 |
(1)求点A的坐标、抛物线的解析式及顶点N的坐标;
(2)在图1中的上找一点P0,使P0到点A与点C的距离之和最小;并求△PAC周长的最小值;
(3)如图2,在线段CO上有一动点M以每秒2个单位的速度从点C向点O移动(M不与端点C、O重合),过点M作MH∥CB交x轴于点H,设M移动的时间为秒,试把△P0HM的面积S表示成时间的函数,当为何值时,S有最大值,并求出最大值.
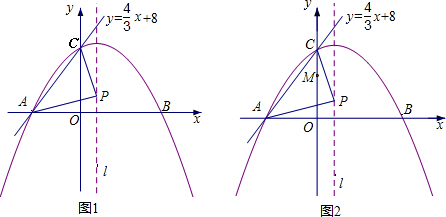
(2012•博野县模拟)如图,在平面直角坐标系中,直线AC:y=
x+8与x轴交于点A,与y轴交于点C,抛物线y=ax2+bx+c过点A、点C,且与x轴的另一交点为B(x0,0),其中x0>0,又点P是抛物线的对称轴l上一动点.
(1)求点A的坐标,并在图1中的l上找一点P0,使P0到点A与点C的距离之和最小;
(2)若△PAC周长的最小值为10+2
,求抛物线的解析式及顶点N的坐标;
(3)如图2,在线段CO上有一动点M以每秒2个单位的速度从点C向点O移动(M不与端点C、O重合),过点M作MH∥CB交x轴于点H,设M移动的时间为t秒,试把△P0HM的面积S表示成时间t的函数,当t为何值时,S有最大值,并求出最大值.
查看习题详情和答案>>
| 4 |
| 3 |
(1)求点A的坐标,并在图1中的l上找一点P0,使P0到点A与点C的距离之和最小;
(2)若△PAC周长的最小值为10+2
| 41 |
(3)如图2,在线段CO上有一动点M以每秒2个单位的速度从点C向点O移动(M不与端点C、O重合),过点M作MH∥CB交x轴于点H,设M移动的时间为t秒,试把△P0HM的面积S表示成时间t的函数,当t为何值时,S有最大值,并求出最大值.