摘要:杠杆的平衡条件( ) A.动力等于阻力 B.动力臂等于阻力臂 C.动力与动力臂之比等于动力臂与阻力臂之比 D.动力与动力臂的乘积等于阻力与阻力臂的乘积
网址:http://m.1010jiajiao.com/timu3_id_3996816[举报]
探究杠杆的平衡条件
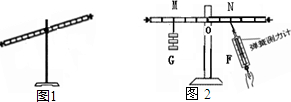
(1)如图1所示,若杠杆在使用前左端低,右端高,要使它在水平位置平衡,应将杠杆右端的螺母向______(填“左”或“右”)调节至平衡.杠杆平衡后,在整个实验过程中______(填“可以”或“不可以”)再旋动两侧的螺母.
(2)下列实验步骤中
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
B、计算每次实验中F1×L1和F2×L2的大小,根据计算结果得出杠杆的平衡条件.
C、改变钩码的个数和位置,重复实验.
D、记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中.
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡.
正确的顺序是______ (填序号).
(3)如图2若斜向下拉动弹簧测力计使杠杆处于水平位置平衡,此时钩码总重力为G,测力计的拉力为F,则G×OM______ F×ON.(填“>”“<”或“=”)
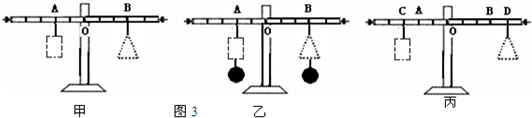
(4)如图3甲,某次实验时杠杆处于水平平衡状态,悬挂在A、B两点的钩码个数(虚线框内)未画出.若在两端再同时挂上相等质量的小球(如图3乙),则杠杆______.若将甲图中左右两端的钩码各自向外侧移动一小格(如图3丙),则杠杆______(以上两空选填序号:①右端下降 ②左端下降 ③仍水平静止)
查看习题详情和答案>>
探究杠杆的平衡条件

(1)如图1所示,若杠杆在使用前左端低,右端高,要使它在水平位置平衡,应将杠杆右端的螺母向______(填“左”或“右”)调节至平衡.杠杆平衡后,在整个实验过程中______(填“可以”或“不可以”)再旋动两侧的螺母.
(2)下列实验步骤中
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
B、计算每次实验中F1×L1和F2×L2的大小,根据计算结果得出杠杆的平衡条件.
C、改变钩码的个数和位置,重复实验.
D、记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中.
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡.
正确的顺序是______ (填序号).
(3)如图2若斜向下拉动弹簧测力计使杠杆处于水平位置平衡,此时钩码总重力为G,测力计的拉力为F,则G×OM______ F×ON.(填“>”“<”或“=”)
(4)如图3甲,某次实验时杠杆处于水平平衡状态,悬挂在A、B两点的钩码个数(虚线框内)未画出.若在两端再同时挂上相等质量的小球(如图3乙),则杠杆______.若将甲图中左右两端的钩码各自向外侧移动一小格(如图3丙),则杠杆______(以上两空选填序号:①右端下降 ②左端下降 ③仍水平静止)

查看习题详情和答案>>
(1)如图1所示,若杠杆在使用前左端低,右端高,要使它在水平位置平衡,应将杠杆右端的螺母向______(填“左”或“右”)调节至平衡.杠杆平衡后,在整个实验过程中______(填“可以”或“不可以”)再旋动两侧的螺母.
(2)下列实验步骤中
A、调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
B、计算每次实验中F1×L1和F2×L2的大小,根据计算结果得出杠杆的平衡条件.
C、改变钩码的个数和位置,重复实验.
D、记下动力F1、动力臂L1、阻力F2和阻力臂L2的大小,将数据填入表格中.
E、将钩码挂在杠杆的支上点两边,先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置重新平衡.
正确的顺序是______ (填序号).
(3)如图2若斜向下拉动弹簧测力计使杠杆处于水平位置平衡,此时钩码总重力为G,测力计的拉力为F,则G×OM______ F×ON.(填“>”“<”或“=”)
(4)如图3甲,某次实验时杠杆处于水平平衡状态,悬挂在A、B两点的钩码个数(虚线框内)未画出.若在两端再同时挂上相等质量的小球(如图3乙),则杠杆______.若将甲图中左右两端的钩码各自向外侧移动一小格(如图3丙),则杠杆______(以上两空选填序号:①右端下降 ②左端下降 ③仍水平静止)
查看习题详情和答案>>
 某同学在做“研究杠杆的平衡条件”实验中,(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,如图所示,此时可将右端螺母向
某同学在做“研究杠杆的平衡条件”实验中,(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右端下倾,如图所示,此时可将右端螺母向左
左
边旋转,使杠杆在水平位置平衡(填“左”或“右”).| 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 3 | 4 | 4 | 3 |
实验不能只凭一组数据得到结论,必须在多次实验的基础上通过分析才能得出结论;单位不同的两个物理量不能直接相加
实验不能只凭一组数据得到结论,必须在多次实验的基础上通过分析才能得出结论;单位不同的两个物理量不能直接相加
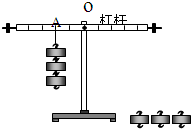
.(3)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边离支点2格的A处挂了3个钩码,如图中所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用一种方法).你的方法是
在杠杆右边、离支点3格的位置挂2个钩码
在杠杆右边、离支点3格的位置挂2个钩码
.(4)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析.这样做的目的是
避免偶然性,得到普遍规律
避免偶然性,得到普遍规律
.通过实验,你得出的杠杆平衡条件是动力×动力臂=阻力×阻力臂
动力×动力臂=阻力×阻力臂
.16、在研究动力、动力臂与阻力、阻力臂之间有什么关系时杠杆能够平衡时,用如图所示的装置,进行了如下的操作:

A.调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平静止,达到平衡状态.
B.给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆在水平位置平衡.
C.测出杠杆在水平位置平衡时的动力臂和阻力臂.
①上表是测量的结果.分析表中的数据可以发现:当F1=F2时,L1=L2;当F1>F2时,L1<L2;当F1<F2时,L1>L2.若对它们进行加、减、乘、除等运算,可以得到杠杆的平衡条件是
②实验中,让杠杆在水平位置平衡的的好处是便于测量
查看习题详情和答案>>
A.调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平静止,达到平衡状态.
B.给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆在水平位置平衡.
C.测出杠杆在水平位置平衡时的动力臂和阻力臂.
①上表是测量的结果.分析表中的数据可以发现:当F1=F2时,L1=L2;当F1>F2时,L1<L2;当F1<F2时,L1>L2.若对它们进行加、减、乘、除等运算,可以得到杠杆的平衡条件是
F1L1=F2L2
(用字母表示).②实验中,让杠杆在水平位置平衡的的好处是便于测量
力臂
.在“研究杠杆平衡条件”实验中

(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母A向
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向
(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时加一个相同的钩码,这时杠杆将
(4)实验过程中,小芳发现用两个钩码可以平衡三个钩码,如图丙所示,小芳还观察到两侧钩码到支点的距离不等,于是她想,杠杆平衡,不能只看动力和阻力的大小,可能还与力的作用点到支点的距离有关.于是她反复做了几次实验,分析得出杠杆的平衡条件为:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,老师看后,指出了她的不足之处,可是小芳感到迷惑不解,“通过实验得出的结论怎么可能有问题呢?”老师拿来一个弹簧测力计,把测力计的挂钩挂在图中A点上…小芳明白了.
①请你简要说明老师是怎样做的.
②请你将小芳得出的杠杆平衡条件的结论纠正:
查看习题详情和答案>>
(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母A向
右
右
调(填“左”或“右”)(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向
右
右
(填“左”或“右”)移动2
2
格.(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时加一个相同的钩码,这时杠杆将
顺时针转动
顺时针转动
.(填“保持水平平衡”、“顺时针转动”或“逆时针转动”)(4)实验过程中,小芳发现用两个钩码可以平衡三个钩码,如图丙所示,小芳还观察到两侧钩码到支点的距离不等,于是她想,杠杆平衡,不能只看动力和阻力的大小,可能还与力的作用点到支点的距离有关.于是她反复做了几次实验,分析得出杠杆的平衡条件为:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,老师看后,指出了她的不足之处,可是小芳感到迷惑不解,“通过实验得出的结论怎么可能有问题呢?”老师拿来一个弹簧测力计,把测力计的挂钩挂在图中A点上…小芳明白了.
①请你简要说明老师是怎样做的.
②请你将小芳得出的杠杆平衡条件的结论纠正: