摘要:13.如图3所示为做直线运动物体的v-t图象.由图中给出的数据可知: 在0-6s内物体做 运动.这阶段的加速度为 m/s2,在6s-9s内物体做 运动.这阶段的加速度为 m/s2前 9s内的平均速度是 m/s.
网址:http://m.1010jiajiao.com/timu3_id_1563353[举报]
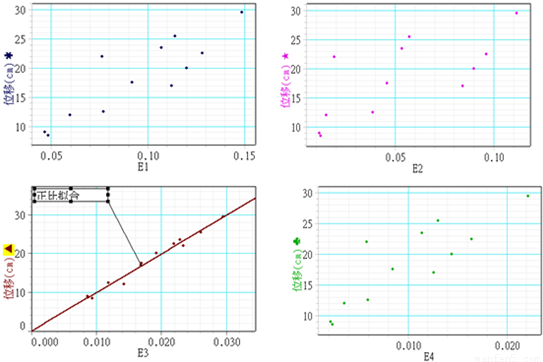
运动物体的动能E与质量m和速度v有关。某同学猜想动能E与m,v的可能关系为E1=mv、E2=m2v、E3=mv2、E4=m2v2。现用DIS探究上述关系。
实验装置
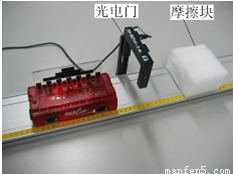
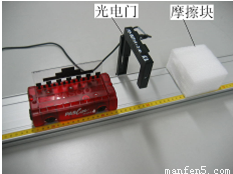
如图所示,将揷有挡光片的导轨小车放在安装有光电门传感器的水平导轨上,忽略小车与导轨间的摩擦。泡沫摩擦块置于光电门支架之后,它与导轨间的动摩擦因数为一确定的值。
实验装置
如图所示,将揷有挡光片的导轨小车放在安装有光电门传感器的水平导轨上,忽略小车与导轨间的摩擦。泡沫摩擦块置于光电门支架之后,它与导轨间的动摩擦因数为一确定的值。
实验过程
给小车一个初速度,让小车通过光电门,然后撞击泡沫摩擦块,并推动摩擦块共同前进距离s,使摩擦块克服滑动摩擦力做功,建立对应的s-E坐标;
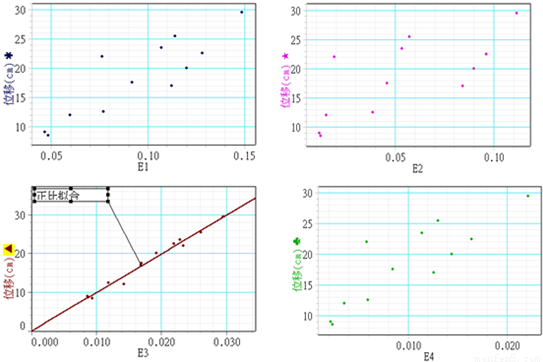
改变小车的质量m、速度v,多次重复上述实验,利用DIS获得下图所示的s-E坐标中的各数据点;
观察各s-E坐标中的数据点发现仅s-E3坐标中的数据点的分布是有规律的:几乎在一直线附近。用正比例拟合后可得拟合直线过原点。
给小车一个初速度,让小车通过光电门,然后撞击泡沫摩擦块,并推动摩擦块共同前进距离s,使摩擦块克服滑动摩擦力做功,建立对应的s-E坐标;
改变小车的质量m、速度v,多次重复上述实验,利用DIS获得下图所示的s-E坐标中的各数据点;
观察各s-E坐标中的数据点发现仅s-E3坐标中的数据点的分布是有规律的:几乎在一直线附近。用正比例拟合后可得拟合直线过原点。

根据实验过程和实验数据回答下列问题:
(1)光电门传感器的作用是____________________________;
(2)实验中选择研究s-E图像,是因为摩擦块滑动距离s能反映____________________________;
(3)由s-E3图线可得到动能E与m,v关系的结论是____________________________。
查看习题详情和答案>>
(1)光电门传感器的作用是____________________________;
(2)实验中选择研究s-E图像,是因为摩擦块滑动距离s能反映____________________________;
(3)由s-E3图线可得到动能E与m,v关系的结论是____________________________。
 运动物体的动能E与质量m和速度v有关.某同学猜想动能E与m,v的可能关系为E1=mv、E2=m2v、E3=mv2、E4=m2v2.现用DIS探究上述关系.
运动物体的动能E与质量m和速度v有关.某同学猜想动能E与m,v的可能关系为E1=mv、E2=m2v、E3=mv2、E4=m2v2.现用DIS探究上述关系.实验装置 如图所示,将揷有挡光片的导轨小车放在安装有光电门传感器的水平导轨上,忽略小车与导轨间的摩擦.泡沫摩擦块置于光电门支架之后,它与导轨间的动摩擦因素为一确定的值.
实验过程
给小车一个初速度,让小车通过光电门,然后撞击泡沫摩擦块,并推动摩擦块共同前进距离s,使摩擦块克服滑动摩擦力做功.建立对应的s-E坐标.
改变小车的质量m、速度v,多次重复上述实验,利用DIS获得下图所示的s-E坐标中的各数据点.
观察各s-E坐标中的数据点发现仅s-E3坐标中的数据点的分布是有规律的:几乎在一直线附近.用正比例拟合后可得拟合直线过原点.
根据实验过程和实验数据回答下列问题
(1)光电门传感器的作用是______
(2)实验中选择研究s-E图象,是因为摩擦块滑动距离s能反映______
(3)由s-E3图线可得到动能E与m,v关系的结论是:______.
查看习题详情和答案>>
 运动物体的动能E与质量m和速度v有关.某同学猜想动能E与m,v的可能关系为E1=mv、E2=m2v、E3=mv2、E4=m2v2.现用DIS探究上述关系.
运动物体的动能E与质量m和速度v有关.某同学猜想动能E与m,v的可能关系为E1=mv、E2=m2v、E3=mv2、E4=m2v2.现用DIS探究上述关系.实验装置 如图所示,将揷有挡光片的导轨小车放在安装有光电门传感器的水平导轨上,忽略小车与导轨间的摩擦.泡沫摩擦块置于光电门支架之后,它与导轨间的动摩擦因素为一确定的值.
实验过程
给小车一个初速度,让小车通过光电门,然后撞击泡沫摩擦块,并推动摩擦块共同前进距离s,使摩擦块克服滑动摩擦力做功.建立对应的s-E坐标.
改变小车的质量m、速度v,多次重复上述实验,利用DIS获得下图所示的s-E坐标中的各数据点.
观察各s-E坐标中的数据点发现仅s-E3坐标中的数据点的分布是有规律的:几乎在一直线附近.用正比例拟合后可得拟合直线过原点.
根据实验过程和实验数据回答下列问题
(1)光电门传感器的作用是______
(2)实验中选择研究s-E图象,是因为摩擦块滑动距离s能反映______
(3)由s-E3图线可得到动能E与m,v关系的结论是:______.
查看习题详情和答案>>