网址:http://m.1010jiajiao.com/timu3_id_1551825[举报]

(1)利用图(b)中的数据求1s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度△t3.
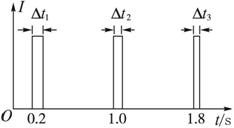
之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线.图6-3(a)为该装置示意图,图6-3(b)为所接收的光信号随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3 s,Δt2=0.8×10-3 s.
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3.


图6-3
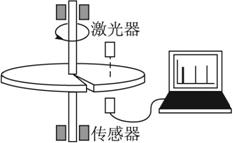
查看习题详情和答案>>一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为2 mm的均匀狭缝。将激光器与传感器上下对准,使二者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地沿圆盘半径方向匀速移动,激光器连续向下发射激光束.在圆盘转动过程中,当狭缝经过激光器与传感器之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线。图 (a)为该装置示意图,图(b)为所接收的光信号随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3 s, Δt2=0.8×10-3 s.
利用图(b)中的数据可以知道1 s时圆盘转动的角速度 rad/s;激光器和传感器沿半径移动的方向是 (填“沿半径向圆心”或“沿半径向外”),移动的速度大小是 m/s;还可以知道第三个激光信号的宽度Δt3= s 。
查看习题详情和答案>>
(a)
(b)
图
(1)利用图(b)中的数据求1 s时圆盘转动的角速度;
(2)说明激光器和传感器沿半径移动的方向;
(3)求图(b)中第三个激光信号的宽度Δt3.
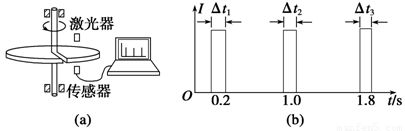
查看习题详情和答案>>一水平放置的圆盘绕竖直固定轴转动,在圆盘上沿半径开有一条宽度为2 mm的均匀狭缝。将激光器与传感器上下对准,使二者间连线与转轴平行,分别置于圆盘的上下两侧,且可以同步地沿圆盘半径方向匀速移动,激光器连续向下发射激光束.在圆盘转动过程中,当狭缝经过激光器与传感器之间时,传感器接收到一个激光信号,并将其输入计算机,经处理后画出相应图线。图 (a)为该装置示意图,图(b)为所接收的光信号随时间变化的图线,横坐标表示时间,纵坐标表示接收到的激光信号强度,图中Δt1=1.0×10-3 s, Δt2=0.8×10-3 s.
利用图(b)中的数据可以知道1 s时圆盘转动的角速度 rad/s;激光器和传感器沿半径移动的方向是 (填“沿半径向圆心”或“沿半径向外”),移动的速度大小是 m/s;还可以知道第三个激光信号的宽度Δt3= s 。
查看习题详情和答案>>