网址:http://m.1010jiajiao.com/timu3_id_1517868[举报]
下图所示的实验装置可以探究杠杆受两个阻力(F2、F3)时的平衡条件.在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置.通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表.表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位.
(1)分析表中的数据,可得杠杆的平衡条件是________.(填写关系式)
(2)在农村还广泛使用的杆秤就利用了上述原理.下图是一根杆秤的示意图.小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整.
①用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如下图所示.
②用刻度尺测量挂钩到________的距离l;
③在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④设
杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件Mgx1=________+G0l0以及________=m2gl+G0l0两式相减得M=________(
要求用l、x1、x2、m1、m2表示).(1)分析表中的数据,可得杠杆的平衡条件是________________。(填写关系式)
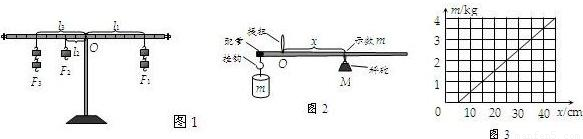
(2)在农村还广泛使用的杆秤就利用了上述原理。图2是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图3所示。
② 用刻度尺测量挂钩到________ 的距离l;
③ 在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件 Mgx1 =________ + G0 l0 以及________________ = m2gl + G0 l0 两式相减得 M=________________ (要求用l、x1、x2、m1、m2表示)。


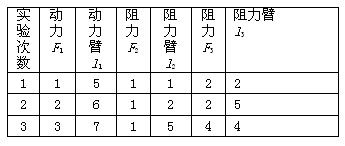
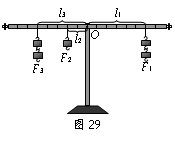
图29所示的实验装置可以探究杠杆受两个阻力(F2F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验 次数 | 动力 F1 | 动力臂 l1 | 阻力 F2 | 阻力臂 l2 | 阻力 F3 | 阻力臂 l3 |
1 | 1 | 5 | 1 | 1 | 2 | 2 |
2 | 2 | 6 | 1 | 2 | 2 | 5 |
3 | 3 | 7 | 1 | 5 | 4 | 4 |
(1)分析表中的数据,可得杠杆的平衡条件是 。(填写关系式)
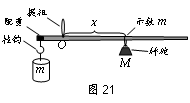
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
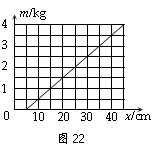
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到 的距离l;
③ 在m-x关系图象中任意读取两组数据x1m1和x2m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件 Mg x1 = + G0 l0
以及 = m2gl + G0 l0两式相减得 M= (要求用l、x1x2m1m2表示)。

图29所示的实验装置可以探究杠杆受两个阻力(F2、F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验 次数 | 动力 F1 | 动力臂 l1 | 阻力 F2 | 阻力臂 l2 | 阻力 F3 | 阻力臂 l3 |
1 | 1 | 5 | 1 | 1 | 2 | 2 |
2 | 2 | 6 | 1 | 2 | 2 | 5 |
3 | 3 | 7 | 1 | 5 | 4 | 4 |
(1)分析表中的数据,可得杠杆的平衡条件是 。(填写关系式)
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到 的距离l;
③ 在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件
Mg x1 = + G0 l0
以及 = m2gl + G0 l0
两式相减得 M= (要求用l、x1、x2、m1、m2表示)。
| 实验次数 | 动力F1 | 动力臂L1 | 动力F2 | 动力臂L2 | 动力F3 | 动力臂L3 |
| 1 | 1 | 5 | 1 | 1 | 2 | 2 |
| 2 | 2 | 6 | 1 | 2 | 2 | 5 |
| 3 | 3 | 7 | 1 | 5 | 4 | 4 |
(2)在农村还广泛使用的杆秤就利用了上述原理.图2是一根杆秤的示意图.小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整.
①用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图3所示.
②用刻度尺测量挂钩到______的距离l;
③在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④设杆秤自重G,重心到提扭的距离l,据杠杆平衡条件Mgx1=______+Gl以及______=m2gl+Gl两式相减得 M=______(要求用l、x1、x2、m1、m2表示).
查看习题详情和答案>>