摘要:20.如图8所示.在“研究杠杆平衡条件 的实验中.在杠杆的左端悬挂一个物体.右端用弹簧测力计拉着.使杠杆在水平位置保持平衡.今拉着弹簧测力计缓慢地沿图中虚线的位置1移动到位置2 (杠杆始终在水平位置保持平衡).则弹簧测力计的示数将( ) A.不断增大 B.先减小.后增大 C.不断减小 D.先增大.后减小
网址:http://m.1010jiajiao.com/timu3_id_1344802[举报]
 如图所示,在研究杠杆平衡条件实验中:
如图所示,在研究杠杆平衡条件实验中:(1)实验前,杠杆应在水平位置平衡,目的是
便于测量力臂
便于测量力臂
.此时应将平衡螺母向左
左
(选填“左”或“右”)调节.(2)下表是小明同学探究过程所记录的数据.
| 次数 | 动力F1 (N) |
动力臂l1 (cm) |
F1×l1 (N?cm) |
阻力F2 (N) |
阻力臂l2 (cm) |
F2×l2 (N?cm) |
平衡情况 |
| 1 | 1 | 5 | 5 | 0.5 | 10 | 5 | 水平平衡 |
| 2 | 1 | 6 | 6 | 0.5 | 12 | 6 | 水平平衡 |
| 3 | 1.5 | 2 | 3 | 1 | 2 | 2 | F1端下沉 |
| 4 | 1.5 | 6 | 9 | 2 | 4 | 8 | F1端下沉 |
| 5 | 2 | 5 | 10 | 3 | 5 | 15 | F2端下沉 |
F1×l1≠F2×l2
F1×l1≠F2×l2
时,杠杆无法保持水平平衡.(3)在第4次实验中,小军发现F1端下沉,赶紧调节杠杆右端平衡螺母,使得杠杆恢复水平平衡.他的操作是
错误
错误
的(选填“正确”或“错误”). 12、在“研究杠杆平衡条件”的实验中,在如图所示的实验装置中:
12、在“研究杠杆平衡条件”的实验中,在如图所示的实验装置中:(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向
右
(选填“左”或“右”)边旋一些,使杠杆在水平位置平衡.(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①.
在第6个格处挂2个钩码
;②在第3个格处挂4个钩码
.(3)在实验中,王亮同学猜想:杠杆平衡的条件可能是:动力+动力臂=阻力+阻力臂.马欣同学猜想:杠杆平衡的条件可能是:动力×动力臂=阻力×阻力臂.他们共同通过实验,获得了一组数据.如下表.

根据上表数据,他们都认为自己的猜想是对的、对方是错误的,那么你认为他们实验的验证方法存在什么问题?
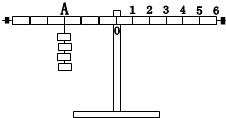 在“研究杠杆平衡条件”的实验中,在如图所示的实验装置中:
在“研究杠杆平衡条件”的实验中,在如图所示的实验装置中:
(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向 ________(选填“左”或“右”)边旋一些,使杠杆在水平位置平衡.
(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①. ________;②________.
(3)在实验中,王亮同学猜想:杠杆平衡的条件可能是:动力+动力臂=阻力+阻力臂.马欣同学猜想:杠杆平衡的条件可能是:动力×动力臂=阻力×阻力臂.他们共同通过实验,获得了一组数据.如下表.

根据上表数据,他们都认为自己的猜想是对的、对方是错误的,那么你认为他们实验的验证方法存在什么问题?
查看习题详情和答案>>
 在“研究杠杆平衡条件”的实验中,如图所示:
在“研究杠杆平衡条件”的实验中,如图所示:
(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端的平衡螺母向______边旋一些(选填“左”或“右”),使杠杆在______位置平衡,这样做的目的是______.
(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①______;②______.
查看习题详情和答案>>
在“研究杠杆平衡条件”的实验中,在如图所示的实验装置中:
(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向 ______(选填“左”或“右”)边旋一些,使杠杆在水平位置平衡.
(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①. ______;②______.
(3)在实验中,王亮同学猜想:杠杆平衡的条件可能是:动力+动力臂=阻力+阻力臂.马欣同学猜想:杠杆平衡的条件可能是:动力×动力臂=阻力×阻力臂.他们共同通过实验,获得了一组数据.如下表.

根据上表数据,他们都认为自己的猜想是对的、对方是错误的,那么你认为他们实验的验证方法存在什么问题?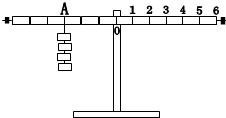
查看习题详情和答案>>
(1)实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向 ______(选填“左”或“右”)边旋一些,使杠杆在水平位置平衡.
(2)实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①. ______;②______.
(3)在实验中,王亮同学猜想:杠杆平衡的条件可能是:动力+动力臂=阻力+阻力臂.马欣同学猜想:杠杆平衡的条件可能是:动力×动力臂=阻力×阻力臂.他们共同通过实验,获得了一组数据.如下表.
根据上表数据,他们都认为自己的猜想是对的、对方是错误的,那么你认为他们实验的验证方法存在什么问题?