题目内容
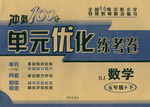
 如图所示,在研究杠杆平衡条件实验中:
如图所示,在研究杠杆平衡条件实验中:(1)实验前,杠杆应在水平位置平衡,目的是
便于测量力臂
便于测量力臂
.此时应将平衡螺母向左
左
(选填“左”或“右”)调节.(2)下表是小明同学探究过程所记录的数据.
| 次数 | 动力F1 (N) |
动力臂l1 (cm) |
F1×l1 (N?cm) |
阻力F2 (N) |
阻力臂l2 (cm) |
F2×l2 (N?cm) |
平衡情况 |
| 1 | 1 | 5 | 5 | 0.5 | 10 | 5 | 水平平衡 |
| 2 | 1 | 6 | 6 | 0.5 | 12 | 6 | 水平平衡 |
| 3 | 1.5 | 2 | 3 | 1 | 2 | 2 | F1端下沉 |
| 4 | 1.5 | 6 | 9 | 2 | 4 | 8 | F1端下沉 |
| 5 | 2 | 5 | 10 | 3 | 5 | 15 | F2端下沉 |
F1×l1≠F2×l2
F1×l1≠F2×l2
时,杠杆无法保持水平平衡.(3)在第4次实验中,小军发现F1端下沉,赶紧调节杠杆右端平衡螺母,使得杠杆恢复水平平衡.他的操作是
错误
错误
的(选填“正确”或“错误”).分析:(1)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此在此实验中我们应首先调节杠杆在水平位置平衡,使杠杆在水平位置平衡的目的是为了便于测量力臂.
(2)杠杆的平衡条件是动力×动力臂=阻力×阻力臂,即F1×L1=F2×L2.
(3)注意杠杆调节平衡后就不能再移动平衡螺母,否则杠杆的平衡将会被破坏.
(2)杠杆的平衡条件是动力×动力臂=阻力×阻力臂,即F1×L1=F2×L2.
(3)注意杠杆调节平衡后就不能再移动平衡螺母,否则杠杆的平衡将会被破坏.
解答:解:(1)在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则重心应向左移动,故应将右端的平衡螺母向左调节.
(2)分析表中数据发现1、2两次实验中,符合F1×L1=F2×L2,杠杆平衡,3、4、5三次实验中不符合这个规律,杠杆就不能平衡.
(3)将钩码挂在杠杆上后,重新调节平衡螺母会破坏杠杆的平衡,使实验结论不准确,因此小军的操作是不正确的.
故答案为:(1)便于测量力臂;左;(2)F1×l1≠F2×l2;(3)错误.
(2)分析表中数据发现1、2两次实验中,符合F1×L1=F2×L2,杠杆平衡,3、4、5三次实验中不符合这个规律,杠杆就不能平衡.
(3)将钩码挂在杠杆上后,重新调节平衡螺母会破坏杠杆的平衡,使实验结论不准确,因此小军的操作是不正确的.
故答案为:(1)便于测量力臂;左;(2)F1×l1≠F2×l2;(3)错误.
点评:在探究杠杆平衡条件时,杠杆的重心应调到支点上,使其不影响两边力与力臂的乘积相等;在加挂钩码过程中不能重新调节平衡螺母,否则得出的结论有误.

练习册系列答案
 冲刺100分单元优化练考卷系列答案
冲刺100分单元优化练考卷系列答案
相关题目




 如图所示,在“研究杠杆平衡条件”的实验中:
如图所示,在“研究杠杆平衡条件”的实验中: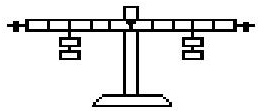 (2005?闸北区二模)如图所示,在“研究杠杆平衡条件”实验中,所用器材有带刻度的杠杆、铁架台、弹簧秤、弹簧夹和
(2005?闸北区二模)如图所示,在“研究杠杆平衡条件”实验中,所用器材有带刻度的杠杆、铁架台、弹簧秤、弹簧夹和 如图所示,在研究杠杆平衡条件时,杆的质量忽略不计,在杆的a点挂上重物G,在O右侧某点b处挂上钩码.重物G的质量及a到O的距离不变,要使杆保持水平,b点挂的钩码个数(各个钩码质量相同)和b到O的距离的关系是哪一幅图象( )
如图所示,在研究杠杆平衡条件时,杆的质量忽略不计,在杆的a点挂上重物G,在O右侧某点b处挂上钩码.重物G的质量及a到O的距离不变,要使杆保持水平,b点挂的钩码个数(各个钩码质量相同)和b到O的距离的关系是哪一幅图象( )